1 引言
在干旱半干旱地区, 水分是制约植被生长的重要的因素之一. 目前已有很多学者建立了关于植被-水动力学反应扩散方程, 进而从理论和数值上研究了植被斑图的形成[1 3] . 植被斑图可以表征植被在时间和空间上的分布特征. 1999 年, Klausmeier[4 ] 首次应用反应扩散方程建立了一个二变量的植被-水模型
(1.1) $\begin{cases} \cfrac{{\partial W}}{{\partial T}} = A - LW - RW{P^2} + V\nabla W,\\ \cfrac{{\partial P}}{{\partial T}} = RJW{P^2} - MP + D_P\Delta P,\\ \end{cases}$
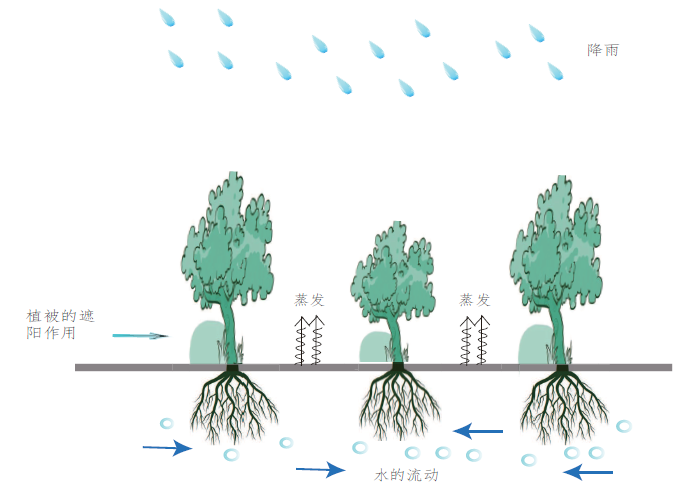
这里$P$ $W$ $R$ $J$ $M$ $A$ $L$ $V\nabla W$ $D_P$ [5 ] 在模型(1.1) 的基础上将水分为地下水和地表水, 建立了三变量反应扩散系统并研究了植被斑图的形成机制. 事实上, 遮阳效应对减少水分的蒸发起到了很大的作用[6 ] . 因此研究遮阳效应对干旱半干旱地区植被的影响是一项有意义的工作. 但是, 目前关于带有遮阳效应的植被模型的研究工作较少. 为此, 基于模型(1.1), 我们构建了一类具有遮阳效应的植被-水模型
(1.2) $\begin{cases} \cfrac{\partial P}{\partial T}=JRWP^2-MP+D_ P\Delta P, \ \ \ X\in \Omega,\ T>0,\\[2mm] \cfrac{\partial W}{\partial T}=A-(1-\alpha P)W-RWP^2+D_W\Delta W, \ \ \ X\in \Omega,\ T>0,\\[2mm] P_X=W_X=0, \ \ \ X\in \partial \Omega, \ T\geq0,\\ P(X,0)=P_0(X)\geq0, W(X,0)=W_0(X)\geq0, \ \ \ X\in \Omega, \end{cases}$
其中, $\Omega\subset\mathbb{R} $ $\alpha$ $D_W$ 图1 展示了植被的遮阳效应以及植被和水之间相互作用的示意图
图1
图1
植被的遮阳作用以及植被和水之间相互作用的示意图
目前, 有很多研究是基于图灵理论研究图灵斑图的演化过程[3 ,5 ] . 事实上, 图灵斑图是图灵分支的产物, 而图灵分支是一种特殊的稳态分支. 迄今为止, 一些学者对反应扩散模型的稳态分支问题进行了研究[7 10] . 例如, Wang 等人[7 ] 运用Crandall-Rabinowitz 分歧定理得到了非常数稳态解的结构. Yi 等人[8 ] 研究了Hopf 分支和稳态分支问题. 但以上研究都只考虑了单特征值情形下的稳态分支问题. 为了进一步分析和完善稳态分支理论, 本文选取$\alpha$
与文献 [7 10] 相比, 本文的主要工作和贡献在于从正常数解出发, 研究了模型 (1.2) 在单特征值和双特征值情形下非常数稳态解的解析结构. 需要指出的是, 由于经典的 Crandall-Rabinowitz 分歧定理不能适用于双特征值情形, 因此需要提出一种有效的方法解决这一问题. 这里, 我们应用隐函数定理和空间分解方法对双特征值情形进行理论分析.
本文的主要内容安排如下: 第2 节, 建立了一类具有遮阳效应的植被-水模型, 给出了稳态分支产生的条件. 第3 节, 分别分析了在单特征值和双特征值情形下非常数解的解析结构. 第4 节, 通过数值模拟验证了非常数解的存在性. 第5 节为本文的结论.
2 稳态分支
(2.1) $\begin{cases} \cfrac{\partial p}{\partial t}=wp^2-mp+\Delta p,\ \ \ x\in \Omega,\ t>0,\\ \cfrac{\partial w}{\partial t}=a-(1-\rho p)w-wp^2+d\Delta w,\ \ \ x\in \Omega,\ t>0,\\ p_x=w_x=0, x\in \partial\Omega,\ t\geq0,\\ p(x,0)=p_0(x)\geq0, w(x,0)=w_0(x)\geq0, x\in \Omega.\\ \end{cases}$
下面将$\rho$ $E_0=(0, a)$
下面对这三个常数解进行稳定性分析. 所研究的空间区域为$\Omega=(0, l\pi)$ . 首先给出了系统(2.1) 对应的稳态问题
(2.2) $\begin{cases} \begin{split} &-p_{xx}=wp^2-mp, &&\ x\in (0, l\pi),\\ &-d w_{xx}=a-(1-\rho p)w-wp^2, &&\ x\in (0, l\pi),\\ &p_x=w_x=0, &&\ x=0, l\pi.\\ \end{split} \end{cases}$
(2.3) $\begin{equation} \begin{cases} \begin{split} &-\vartheta_{xx}=\lambda \vartheta,\ \ &&x\in (0, l\pi),\\ &\vartheta_x=0, \ \ &&x=0, l\pi. \end{split} \end{cases} \end{equation}$
(2.3) 式对应的特征值为 $\lambda _k=(\frac{k}{l})^2, \ k\in \{0,1,2,\cdot\cdot\cdot\},$
该算子的特征方程为:$L(\rho)(\phi,\psi)^\mathrm{T}=\mu(\phi,\psi)^\mathrm{T}$ $\phi=\sum\limits_{k=0}^{\infty}a_k\phi_k(x), \psi=\sum\limits_{k=0}^{\infty}b_k\phi_k(x), a_k,$ $ b_k\in \mathbb{R}$ . 进一步可得
其中$k$ $T_k(\lambda _k,\rho)=-(1+d)\lambda _k+a_{11}+a_{22}$ $D_k(\lambda _k,\rho)=d\lambda _k^2-(a_{11}d+a_{22})\lambda _k+a_{11}a_{22}-a_{12}a_{21}$ .
定理 2.1 当$a+\rho m>2m$ $k$ $E_0=(0,a)$ $E_1=(p_1,w_1)$
定理 2.2 当$a+\rho m>2m$ $a>m^2-\frac{a\sqrt{(a+\rho m)^2-4m^2}}{2m}$
(2.4) $\begin{split} \rho_k=\frac{d\lambda_k^2-(md-1-p^2)\lambda_k+mp^2-m}{p\lambda_k}. \end{split}$
则有当$\rho>\rho_{\rm max}$ $k\geq1$ $E_2$ $\rho<\rho_{k}$ $k\geq1$ $E_2$
证 当$a>m^2-\frac{a\sqrt{(a+\rho m)^2-4m^2}}{2m}$ $T_k(\lambda _k,\rho)<0$ . 因此平衡点$E_2$ $D_k(\lambda _k,\rho)$ . 又因为有$D_0=\frac{(a+\rho m)^2-4m^2+(a+\rho m)\sqrt{(a+\rho m)^2-4m^2}}{2m}>0$ $D_k, k\geq1$ $\rho>\rho_{\rm max}$ $k\geq1$ $D_k>0$ $E_2$ $\rho<\rho_{k}$ $k\geq1$ $D_k<0$ $E_2$
定理 2.3 设$\Gamma=\{k\mid k\geq1, D_k(\lambda _k,0)>0\}$ $a+\rho m>2m$ $a>m^2-\frac{a\sqrt{(a+\rho m)^2-4m^2}}{2m}$ $k\in \Gamma$ $(\rho_k,(p_2, w_2))$
证明 任意的$k\in \Gamma$ $\rho_k$ $\rho_k$ $D_k(\lambda_k,\rho_k)=0$ $\rho$ $D_k^\prime(\lambda_k,\rho_k)=p_2\lambda_k\neq0$ $(\rho_k,(p_2, w_2))$
3 非常数正稳态解的结构
下面分析从$(n_2,w_2)$ $(n_1,w_1)$ $\rho_k$ $k\neq n$ $\rho_k\neq\rho_n$ ( 单特征值情形) 或$\rho_k=\rho_n$ ( 双特征值情形). 接下来我们分别从这两种情形来讨论稳态解的解析结构.
首先, 令$X=\{(p,w)\in W^{2,2}(0,l\pi)\times W^{2,2}(0,l\pi), p'=w'=0,x=0,l\pi\}$ $Y=L^2(0, l\pi)\times L^2(0, l\pi)$ . 定义如下映射$I:\mathbb{R}^+\times X\rightarrow Y$
(3.1) $I(\rho,(p,w)): =\begin{pmatrix} wp^2-mp+p^{''}\\ a-(1-\rho p)w-wp^2+dw^{''}\\ \end{pmatrix},$
则有$I$ $I(\rho,(p_2,w_2))=0$ $I$ $(p_2,w_2)$
定理 3.1 假设对任意的$n,k\in \Gamma$ $k\neq n$ $\rho_k\neq \rho_n$ $(\rho_k,(p_2, w_2)$ $I(\rho, (p, w))=0$ $|s|$ $\Gamma_k(s)=(\rho(s),(p(s), w(s)))$ $\rho(0)=\rho_k$ $(p(0), w(0))=(p_2, w_2)$ $p(s)=p_2+s\phi_k+o(s^2)$ $w(s)=w_2+sb_k\phi_k+o(s^2)$ $b_k=\frac{\lambda_k-m}{p_2^2}$ .
证 利用Crandall -Rabinowitz 分歧定理来分析稳态问题(2.2)的非常数稳态解的解析结构[11 ] . 要证明$(\rho_k, U^\ast)$ $I(\rho,U)=0$ $U=(p_2, w_2)$ ) 的一个分支点需同时满足如下条件[12 ]
(1) $I_{\rho}, I_U$ $I_{\rho U}$
(2) dimker$ I_U(\rho_k,U^\ast)={\rm codim} R(I_U(\rho_k,U^\ast))=1$
(3) $I_{\rho U}(\rho_k,U^\ast)\Psi\notin R(I_U(\rho_k,U^\ast))$ $\Phi\in {\rm ker} I_U(\rho_k,U^\ast)$ .
通过 (3.1) 式可以看出$I_{\rho}, I_U$ $I_{\rho U}$ $\rho=\rho_k$
记$F(\rho_k)$ $0$ $(a_k\phi_k,b_k\phi_k)^\mathrm{T}$ . 令$a_k=1$ $b_k=\frac{\lambda_k-m}{p_2^2}$ .
因此, ker$ F(\rho_k)={\rm span} \{\Phi_k\}$ $\Phi_k=\begin{pmatrix} 1\\ b_k\\ \end{pmatrix}\phi_k.$ $ F(\rho_k)=1.$ $F(\rho_k)$
类似地, 可以得到$kerF^\ast(\rho_k)={\rm span} \{\Phi_k^\ast\}$ $\Phi_k^\ast=\begin{pmatrix} 1\\ b_k^\ast\\ \end{pmatrix}\phi_p,$ $b_k^\ast=\frac{m-\lambda_k}{p_2^2}$ . 又因为 $R(F(\rho_k))=({\rm ker} F^\ast(\rho_k))^\bot,$ $R(F(\rho_k))=1={\rm dim\,(ker} F(\rho_k))$ .
因此, $I(\rho,U)=0$ $(\rho_k, U^*)$ $U=U^\ast$ $\{(\rho(s),U(s)):s\in (-\epsilon,\epsilon)\}$ $U(s)=U^\ast+s\Phi+o(s^2), \rho(0)=\rho_k$ .
定理 3.2 假设存在一非负整数$n \ (\neq k)$ $n, k \in \Gamma$ $\rho_n=\rho_k=\hat{\rho}$ . 令
其中$b_n=\frac{\lambda_n-m}{p_2^2}$ $b_n^\ast=\frac{m-\lambda_n}{p_2^2}$ . 此外, 令
若$1+b_nb_n^\ast\neq0, 1+b_kb_k^\ast\neq0$ $n=2k$ $k=2n)$ $(\hat{\rho},(p_2, w_2))$ $I(\rho,(p, w))=0$ $|\omega-\omega_0|$ $(\rho(\omega),U+s(\omega)(\cos\omega\Phi_n+\sin\omega\Phi_k+W(\omega)))$ $\rho(\omega_0)=\hat{\rho}, s(\omega_0)=0, W(\omega_0)=0$ $\omega_0$
这里, $U=(p_2, w_2)$ $\rho(\omega),s(\omega),W(\omega)\in X_2$ $\omega$
证 假设存在非负整数$n \ (\neq k)$ $n, k \in \Lambda$ $\rho_n=\rho_k=\hat{\rho}$
则有dimker$ F(\hat{\rho})={\rm codim} R(\hat{\rho})=2$ [13 15] .
步骤 1 将变量平移到原点: $(u,v)=(p,w)-(p_2,w_2)$ $\widetilde{I}:=\mathbb{R}^+\times X\rightarrow Y$
这里$f_1=u^2v+2p_2uv+w_2u^2,$ $g_1=\rho uv-f_1$ . 容易得到,$\widetilde{I}(\hat{\rho},(0,0))=0, \widetilde{I}_{(u,v)}(\hat{\rho},(0,0))=F(\hat{\rho})$ $(p,w)$ $(u,v)$ $\widetilde{I}(\rho,(u,v))=0$ .
其中$X_1={\rm span}\{\Phi_n,\Phi_k\}$ $X_2$
(3.2) $X_2=\left\{(u,v)\in X:\int_0^{l\pi}(u+b_n^\ast v)\phi_n{\rm d}x=\int_0^{l\pi}(u+b_k^\ast v)\phi_k{\rm d}x=0\right\}.$
接下来寻找$\widetilde{I}(\rho,(u,v))=0$
这里$s,\omega\in \mathbb{R}$ . 为了分解$Y$ $P$
(3.3) $\begin{equation}\label{14} P\begin{pmatrix} u\\ v\\ \end{pmatrix} =\frac{1}{1+b_nb_n^\ast}\int_0^{l\pi}(u+b_n^\ast v)\phi_n{\rm d}x\Phi_n+\frac{1}{1+b_kb_k^\ast}\int_0^{l\pi}(u+b_k^\ast v)\phi_k{\rm d}x\Phi_k, \end{equation}$
有$R(P)={\rm span}\{\Phi_n,\Phi_k\}=X_1$ $P^2=P$ . 所以$P$ $Y$ $Y=Y_1\oplus Y_2$ $Y_1=R(P)=X_1$ $Y_2={\rm ker}(P)=R(F(\hat{\rho}))=X_2$ .
步骤 3 通过隐函数定理寻找满足$\widetilde{I}(\rho,(u,v))=0$ $(u,v)$ . 固定$\omega_0\in\mathbb{R}$ $K(\rho,s,W;\omega):\mathbb{R}^+\times \mathbb{R}\times X_2\times (\omega_0-\epsilon,\omega_0+\epsilon)\rightarrow Y$
这里$\widetilde{f_1}=W_2(\phi_n\cos\omega+\phi_k\sin\omega+W_1)^2+2p_2 (\phi_n\cos\omega+\phi_k\sin\omega+W_1)(b_n\phi_n\cos\omega+b_k\phi_k\sin\omega+W_2)+\mathcal{O}(\vert s\vert)$ $\widetilde{g_1}=\rho(\phi_n\cos\omega+\phi_k\sin\omega+W_1)(b_n\phi_n\cos\omega+b_k\phi_k\sin\omega+W_2)-\widetilde{f_1}$ .
$K(\rho,s,W;\omega)$ $(\rho,s,W)$ $(\hat{\rho},0,0;\omega_0)$
这里,$A_1=w_2+p_2b_k, A_2=w_2+p_2b_n, A_3=w_2+2p_2b_n, A_4=w_2+2p_2b_k, A_5=w_2, A_6=b_k+b_n$ .
接下来证明$K_{(\rho,s,W)}(\hat{\rho},0,0;\omega_0):\mathbb{R}\times \mathbb{R}\times X_2\rightarrow Y$ $K_{(\rho,s,W)}(\hat{\rho},0,0;\omega_0)(\rho,s,W)$
这里$\mathrm{y_1}\in Y_1, \mathrm{y_2}\in Y_2$ . 我们做如下分解
接下来讨论两种情形:$n=2k$ $k=2n$ .
此时有,$\int_0^{l\pi}\phi_n^2\phi_k{\rm d}x=\int_0^{l\pi}\phi_n^3{\rm d}x=0$ $\begin{pmatrix} \phi_n^2\\ -\phi_n^2\\ \end{pmatrix}\in Y_2$ $\begin{pmatrix} 0\\ \phi_n^2\\ \end{pmatrix}\in Y_2$ . 分解
令$K_{(\rho,s,W))}(\hat{\rho},0,0;\omega_0)(\rho,s,W)=0$ $\mathrm{y_1}=0, \mathrm{y_2}=0$ . $\mathrm{y_1}=0$
假设$\sin\omega_0\neq0\,$ $2c_4A_5\cos\omega_0(c_1A_2\cos\omega_0+c_6b_k\sin^2\omega_0)\neq c_3A_4\sin^2\omega_0(c_2A_1+c_5A_6\cos\omega_0)$ $s=0, \rho=0$ . 将它们带入$\mathrm{y_2}=0$ $W=0$ . 根据以上推导, 我们有$K_{(\rho,s,W)}(\hat{\rho},0,0;\omega_0)$
下面验证$K_{(\rho,s,W)}(\hat{\rho},0,0;\omega_0)$ $(u,v)\in Y$ $(\rho,s,W)\in\mathbb{R}^+\times \mathbb{R}\times X_2$
(3.4) $K_{(\rho,s,W)}(\hat{\rho},0,0;\omega_0)(\rho,s,W)=(u,v)^\mathrm{T}.$
根据$Y$ $\eta,\gamma\in \mathbb{R}$ $(u_0,v_0)\in Y_2$
(3.5) $\begin{equation} \begin{cases} \begin{split} &c_2A_1\rho\sin\omega_0+2c_4A_5s\sin\omega_0\cos\omega_0++c_5A_c\rho \sin\omega_0\cos\omega_0=\eta,\\ &c_1A_2\rho\cos\omega_0+c_3A_4s\sin^2\omega_0+c_6\rho b_k\sin^2\omega_0=\gamma,\\ &F(\hat{\rho})W\!+\!\rho A_2\cos\omega_0\begin{pmatrix} u_1\\ v_1\\ \end{pmatrix} \!+\!\rho A_1\sin\omega_0\begin{pmatrix} u_2\\ v_2\\ \end{pmatrix}\!+\! sA_4\sin^2\omega_0\begin{pmatrix} u_3\\ v_3\\ \end{pmatrix}\!+\! 2sA_5\sin\omega_0\cos\omega_0\begin{pmatrix} u_4\\ v_4\\ \end{pmatrix}\\& +\rho A_6\sin\omega_0\cos\omega_0\begin{pmatrix} u_5\\ v_5\\ \end{pmatrix}+ \rho b_k\sin^2\omega_0\begin{pmatrix} u_6\\ v_6\\ \end{pmatrix}\\ &+ s A_3\cos^2\omega_0\begin{pmatrix} \phi_n^2\\ -\phi_n^2\\ \end{pmatrix}+ \rho b_n\cos^2\omega_0\begin{pmatrix} 0\\ \phi_n^2\\ \end{pmatrix}=\begin{pmatrix} u_0\\ v_0\\ \end{pmatrix}. \end{split} \end{cases} \end{equation}$
通过计算可得$\rho=\tilde{\rho}, s=\tilde{s}$
接下来将$\tilde{\rho},\tilde{s}$ $W=F^{-1}(\hat{\rho})\begin{pmatrix} \tilde{u}\\ \tilde{v}\\ \end{pmatrix},$
则$(\rho,s,W)=\left(\tilde{\rho},\tilde{s},F^{-1}(\hat{\rho})\begin{pmatrix} \tilde{u}\\ \tilde{v}\\ \end{pmatrix}\right)$ $K_{(\rho,s,W)}(\hat{\rho},0,0;\omega_0)$
因此, 根据隐函数定理, 对于充分小的$|\omega-\omega_0|$ $(\rho(\omega),s(\omega), W(\omega))$ $\rho(\omega_0)=\hat{\rho}, s(\omega_0)=0, W(\omega_0)=0$ . 所以$(\rho(\omega),U+s(\omega)(\cos\omega\Phi_n+\sin\omega\Phi_k+W(\omega)))$ $F(\rho,(p,w))=0$
此时有$\int_0^{l\pi}\phi_k^2\phi_n{\rm d}x=\int_0^{l\pi}\phi_k^3{\rm d}x=0$ $\begin{pmatrix} \phi_k^2\\ -\phi_k^2\\ \end{pmatrix}\in Y_2$ $\begin{pmatrix} 0\\ \phi_k^2\\ \end{pmatrix}\in Y_2$ . 分解
类似于情形 1 的方法, 可以证明当$\omega_0$ $\cos\omega_0\neq0\,$ $2c_8A_5\sin\omega_0(c_2A_1\sin\omega_0+c_{10}b_n$ $\cos^2\omega_0)\neq c_7A_3\cos^2\omega_0(c_1A_2+c_9A_6\sin\omega_0)$ $K_{(\rho,s,W)}(\hat{\rho},0,0;\omega_0)$ $\mathbb{R}^+\times \mathbb{R}\times X_2$ $Y$
4 数值模拟
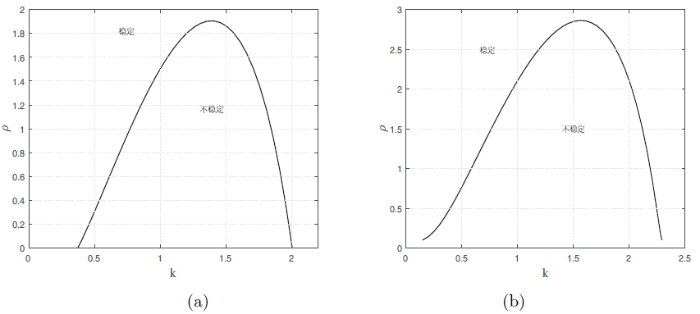
下面将通过数值模拟来验证前面得到的理论结果. 选取参数$a=10.4, m=4.4, d=17.85,$ 图2 , 该图展示了分支参数$\rho_k$ $k$ 图2(a) 有一个单分支点$(\rho_{1}, (p_2, w_2))$ $\rho_k$ $(p_2, w_2)$ $\rho_k$ $(p_2, w_2)$ $k=1$ $\rho_{1}=1.5021$ . 选取参数$a=10.4, m=5.4, d=17.85$ $(\hat{\rho}, (p_2, w_2))$ $\rho_1=\rho_2=\hat{\rho}=2.1078$ 图2(b) 所示.
图2
图2
系统(2.1) 的稳态分支曲线. 参数值为: $(a)$ $a=10.4, m=4.4, d=17.85$ . $(b)$ $a=10.4, m=5.4, d=17.85$
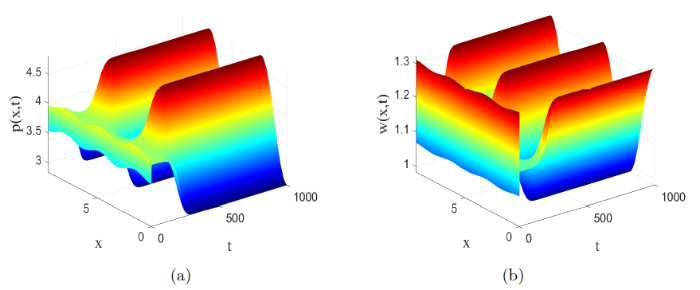
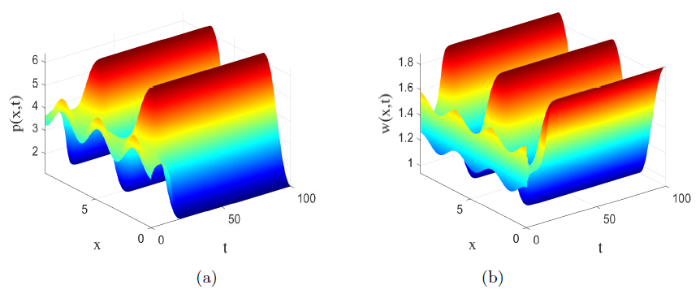
令$l=3$ $a=10.4, m=4.4, d=17.85, \rho=1.5\approx \rho_1(=1.5021)$ $(\rho_1, (p_2, w_2))$ 图3 所示, 这与定理3.1 的结果一致. 此外, 当$a=10.4, m=5.4, d=17.85, \rho=2.1\approx \hat{\rho}$ $(\hat{\rho}, (p_2, w_2))$ 图4 所示, 这与定理3.2 的结果一致.
图3
图3
系统(2.1) 的非常数正稳态解. 参数值为$a=10.4, m=4.4, d=17.85, \rho=1.5$ $\rho$ $\rho_1$ $(a)$ $(b)$
图4
图4
系统(2.1) 的非常数正稳态解. 参数值为$a=10.4, m=5.4, d=17.85, \rho=2.1$ $\rho$ $\hat{\rho}$ $(a)$ $(b)$
5 结论
本文研究了一类空间植被模型的稳态分支问题, 从分支的角度研究了稳态斑图的出现. 首先通过数学分析研究了常数稳态解的稳定性, 并证明了稳态分支的存在性, 得到了稳态分支产生的条件, 进而验证了在单特征值情形和双特征值情形下非常数解的解析结构. 具体来讲, 通过Crandall-Rabinowitz 分歧定理分析了单特征值情形, 利用隐函数定理和空间分解方法研究了双特征值情形. 最后进行了数值实验, 分别模拟了单特征值和双特征值两种情形下的非常数解的结构. 结果表明在分支点附近会出现一条非常数解曲线, 进而验证了理论结果. 本文为双特征情形下的稳态分支问题提供了新的思路.
参考文献
View Option
[1]
Tarnita C E Bonachela J A Sheffer E et al. A theoretical foundation for multi-scale regular vegetation patterns
Nature , 2017 , 541 7637 ): 398 -401
[本文引用: 1]
[2]
Carter P Doelman A Traveling stripes in the Klausmeier model of vegetation pattern formation
SIAM J Appl Math , 2018 , 78 6 ): 3213 -3237
[3]
Liang J Liu C Sun G Q et al. Nonlocal interactions between vegetation induce spatial patterning
Appl Math Comput , 2022 , 428 127061
[本文引用: 2]
[4]
Klausmeier C A Regular and irregular patterns in semiarid vegetation
Science , 1999 , 284 5421 ): 1826 -1828
[本文引用: 1]
[5]
HilleRisLambers R Rietkerk M Van Den Bosch F et al. Vegetation pattern formation in semi-arid grazing systems
Ecology , 2001 , 82 1 ): 50 -61
[本文引用: 2]
[6]
von Hardenberg J Meron E Shachak M et al. Diversity of vegetation patterns and desertification
Phys Rev Lett , 2001 , 87 19 ): 198101
[本文引用: 1]
[7]
Wang X L Shi J P Zhang G H Bifurcation and pattern formation in diffusive Klausmeier-Gray-Scott model of water-plant interaction
J Math Anal Appl , 2021 , 497 1 ): 124860
[本文引用: 3]
[8]
Yi F Q Wei J J Shi J P Bifurcation and spatiotemporal patterns in a homogeneous diffusive predator-prey system
J Differ Equations , 2009 , 246 5 ): 1944 -1977
[本文引用: 1]
[9]
Yi F Q Liu J X Wei J J Spatiotemporal pattern formation and multiple bifurcations in a diffusive bimolecular model
Nonlinear Anal-Real , 2010 , 11 5 ): 3770 -3781
[10]
Wang M X Non-constant positive steady states of the Sel'kov model
J Differ Equations , 2003 , 190 2 ): 600 -620
[本文引用: 2]
[11]
Crandall M G Rabinowitz P H Bifurcation from simple eigenvalues
J Funct Anal , 1971 , 8 2 ): 321 -340
[本文引用: 1]
[12]
Guo G H Li B F Wei M H et al. Hopf bifurcation and steady-state bifurcation for an autocatalysis reaction-diffusion model
J Math Anal Appl , 2012 , 391 1 ): 265 -277
[本文引用: 1]
[13]
Li S B Wu J H Dong Y Y Turing patterns in a reaction-diffusion model with the Degn-Harrison reaction scheme
J Differ Equation , 2015 , 259 5 ): 1990 -2029
[本文引用: 1]
[14]
Li S B Wu J H Nie H Steady-state bifurcation and Hopf bifurcation for a diffusive Leslie-Gower predator-prey model
Comput Math Appl , 2015 , 70 12 ): 3043 -3056
[15]
Wang Y Wu J Jia Y Steady-state bifurcation for a biological depletion model
Int J Bifurcat Chaos , 2016 , 26 4 ): 1650066
[本文引用: 1]
A theoretical foundation for multi-scale regular vegetation patterns
1
2017
... 在干旱半干旱地区, 水分是制约植被生长的重要的因素之一. 目前已有很多学者建立了关于植被-水动力学反应扩散方程, 进而从理论和数值上研究了植被斑图的形成[1 3 ] . 植被斑图可以表征植被在时间和空间上的分布特征. 1999 年, Klausmeier[4 ] 首次应用反应扩散方程建立了一个二变量的植被-水模型 ...
Traveling stripes in the Klausmeier model of vegetation pattern formation
2018
Nonlocal interactions between vegetation induce spatial patterning
2
2022
... 在干旱半干旱地区, 水分是制约植被生长的重要的因素之一. 目前已有很多学者建立了关于植被-水动力学反应扩散方程, 进而从理论和数值上研究了植被斑图的形成[1 3 ] . 植被斑图可以表征植被在时间和空间上的分布特征. 1999 年, Klausmeier[4 ] 首次应用反应扩散方程建立了一个二变量的植被-水模型 ...
... 目前, 有很多研究是基于图灵理论研究图灵斑图的演化过程[3 ,5 ] . 事实上, 图灵斑图是图灵分支的产物, 而图灵分支是一种特殊的稳态分支. 迄今为止, 一些学者对反应扩散模型的稳态分支问题进行了研究[7 10 ] . 例如, Wang 等人[7 ] 运用Crandall-Rabinowitz 分歧定理得到了非常数稳态解的结构. Yi 等人[8 ] 研究了Hopf 分支和稳态分支问题. 但以上研究都只考虑了单特征值情形下的稳态分支问题. 为了进一步分析和完善稳态分支理论, 本文选取$\alpha$
Regular and irregular patterns in semiarid vegetation
1
1999
... 在干旱半干旱地区, 水分是制约植被生长的重要的因素之一. 目前已有很多学者建立了关于植被-水动力学反应扩散方程, 进而从理论和数值上研究了植被斑图的形成[1 3 ] . 植被斑图可以表征植被在时间和空间上的分布特征. 1999 年, Klausmeier[4 ] 首次应用反应扩散方程建立了一个二变量的植被-水模型 ...
Vegetation pattern formation in semi-arid grazing systems
2
2001
... 这里$P$ $W$ $R$ $J$ $M$ $A$ $L$ $V\nabla W$ $D_P$ [5 ] 在模型(1.1) 的基础上将水分为地下水和地表水, 建立了三变量反应扩散系统并研究了植被斑图的形成机制. 事实上, 遮阳效应对减少水分的蒸发起到了很大的作用[6 ] . 因此研究遮阳效应对干旱半干旱地区植被的影响是一项有意义的工作. 但是, 目前关于带有遮阳效应的植被模型的研究工作较少. 为此, 基于模型(1.1), 我们构建了一类具有遮阳效应的植被-水模型 ...
... 目前, 有很多研究是基于图灵理论研究图灵斑图的演化过程[3 ,5 ] . 事实上, 图灵斑图是图灵分支的产物, 而图灵分支是一种特殊的稳态分支. 迄今为止, 一些学者对反应扩散模型的稳态分支问题进行了研究[7 10 ] . 例如, Wang 等人[7 ] 运用Crandall-Rabinowitz 分歧定理得到了非常数稳态解的结构. Yi 等人[8 ] 研究了Hopf 分支和稳态分支问题. 但以上研究都只考虑了单特征值情形下的稳态分支问题. 为了进一步分析和完善稳态分支理论, 本文选取$\alpha$
Diversity of vegetation patterns and desertification
1
2001
... 这里$P$ $W$ $R$ $J$ $M$ $A$ $L$ $V\nabla W$ $D_P$ [5 ] 在模型(1.1) 的基础上将水分为地下水和地表水, 建立了三变量反应扩散系统并研究了植被斑图的形成机制. 事实上, 遮阳效应对减少水分的蒸发起到了很大的作用[6 ] . 因此研究遮阳效应对干旱半干旱地区植被的影响是一项有意义的工作. 但是, 目前关于带有遮阳效应的植被模型的研究工作较少. 为此, 基于模型(1.1), 我们构建了一类具有遮阳效应的植被-水模型 ...
Bifurcation and pattern formation in diffusive Klausmeier-Gray-Scott model of water-plant interaction
3
2021
... 目前, 有很多研究是基于图灵理论研究图灵斑图的演化过程[3 ,5 ] . 事实上, 图灵斑图是图灵分支的产物, 而图灵分支是一种特殊的稳态分支. 迄今为止, 一些学者对反应扩散模型的稳态分支问题进行了研究[7 10 ] . 例如, Wang 等人[7 ] 运用Crandall-Rabinowitz 分歧定理得到了非常数稳态解的结构. Yi 等人[8 ] 研究了Hopf 分支和稳态分支问题. 但以上研究都只考虑了单特征值情形下的稳态分支问题. 为了进一步分析和完善稳态分支理论, 本文选取$\alpha$
... [7 ]运用Crandall-Rabinowitz 分歧定理得到了非常数稳态解的结构. Yi 等人[8 ] 研究了Hopf 分支和稳态分支问题. 但以上研究都只考虑了单特征值情形下的稳态分支问题. 为了进一步分析和完善稳态分支理论, 本文选取$\alpha$
... 与文献 [7 10 ] 相比, 本文的主要工作和贡献在于从正常数解出发, 研究了模型 (1.2) 在单特征值和双特征值情形下非常数稳态解的解析结构. 需要指出的是, 由于经典的 Crandall-Rabinowitz 分歧定理不能适用于双特征值情形, 因此需要提出一种有效的方法解决这一问题. 这里, 我们应用隐函数定理和空间分解方法对双特征值情形进行理论分析. ...
Bifurcation and spatiotemporal patterns in a homogeneous diffusive predator-prey system
1
2009
... 目前, 有很多研究是基于图灵理论研究图灵斑图的演化过程[3 ,5 ] . 事实上, 图灵斑图是图灵分支的产物, 而图灵分支是一种特殊的稳态分支. 迄今为止, 一些学者对反应扩散模型的稳态分支问题进行了研究[7 10 ] . 例如, Wang 等人[7 ] 运用Crandall-Rabinowitz 分歧定理得到了非常数稳态解的结构. Yi 等人[8 ] 研究了Hopf 分支和稳态分支问题. 但以上研究都只考虑了单特征值情形下的稳态分支问题. 为了进一步分析和完善稳态分支理论, 本文选取$\alpha$
Spatiotemporal pattern formation and multiple bifurcations in a diffusive bimolecular model
2010
Non-constant positive steady states of the Sel'kov model
2
2003
... 目前, 有很多研究是基于图灵理论研究图灵斑图的演化过程[3 ,5 ] . 事实上, 图灵斑图是图灵分支的产物, 而图灵分支是一种特殊的稳态分支. 迄今为止, 一些学者对反应扩散模型的稳态分支问题进行了研究[7 10 ] . 例如, Wang 等人[7 ] 运用Crandall-Rabinowitz 分歧定理得到了非常数稳态解的结构. Yi 等人[8 ] 研究了Hopf 分支和稳态分支问题. 但以上研究都只考虑了单特征值情形下的稳态分支问题. 为了进一步分析和完善稳态分支理论, 本文选取$\alpha$
... 与文献 [7 10 ] 相比, 本文的主要工作和贡献在于从正常数解出发, 研究了模型 (1.2) 在单特征值和双特征值情形下非常数稳态解的解析结构. 需要指出的是, 由于经典的 Crandall-Rabinowitz 分歧定理不能适用于双特征值情形, 因此需要提出一种有效的方法解决这一问题. 这里, 我们应用隐函数定理和空间分解方法对双特征值情形进行理论分析. ...
Bifurcation from simple eigenvalues
1
1971
... 证 利用Crandall -Rabinowitz 分歧定理来分析稳态问题(2.2)的非常数稳态解的解析结构[11 ] . 要证明$(\rho_k, U^\ast)$ $I(\rho,U)=0$ $U=(p_2, w_2)$ ) 的一个分支点需同时满足如下条件[12 ] ...
Hopf bifurcation and steady-state bifurcation for an autocatalysis reaction-diffusion model
1
2012
... 证 利用Crandall -Rabinowitz 分歧定理来分析稳态问题(2.2)的非常数稳态解的解析结构[11 ] . 要证明$(\rho_k, U^\ast)$ $I(\rho,U)=0$ $U=(p_2, w_2)$ ) 的一个分支点需同时满足如下条件[12 ] ...
Turing patterns in a reaction-diffusion model with the Degn-Harrison reaction scheme
1
2015
... 则有dimker$ F(\hat{\rho})={\rm codim} R(\hat{\rho})=2$ [13 15 ] . ...
Steady-state bifurcation and Hopf bifurcation for a diffusive Leslie-Gower predator-prey model
2015
Steady-state bifurcation for a biological depletion model
1
2016
... 则有dimker$ F(\hat{\rho})={\rm codim} R(\hat{\rho})=2$ [13 15 ] . ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}