1 引言
种间竞争是不同物种之间为争夺资源而进行的一类竞争现象, 这类现象在现实世界中十分常见, 对它的研究, 在生态学和经济学等诸多领域内都具有重要的理论和实际意义. 自从美国生物数学家 Lotka 和意大利数学家 Volterra 提出著名的 Lotka-Volterra模型[1 ,2 ] 以来, 常微分模型便被学者们广泛用于种群问题的研究.
由于季节更替和资源枯竭, 迁徙和扩散已经成为许多种群的常态, 因此在模型中有必要考虑扩散因素的影响, 对具有扩散项的种间竞争偏微分模型的研究具有重要的理论和实际意义. 当前, 反应扩散方程组在生态学等领域应用广泛, 通常用抛物型偏微分方程来研究反应扩散问题. 在过去的数十年内, 种群动力学模型一直是生态学研究的热门主题之一, 而反应扩散方程组的正平衡解及其长期行为是种群动力学模型所研究的主要内容[3 7] .
在现实世界中, 由于种群的生存与繁殖以及物种之间的竞争能力等, 都与其所处空间有密切的关联, 因此物种与环境以及其他物种的相互作用都与空间变量有关, 并呈现出空间非均匀性. 与空间均匀假设下的自治模型相比, 空间非均匀反应扩散方程组构成的非自治模型包含与空间变量有关的反应函数, 更能反映空间变量对种群的影响, 从而对后者的研究受到了学者们的重视.
现有的对空间非均匀反应扩散方程组的研究多是针对具有特殊性质的反应函数展开的[8 18] .例如, Lou 等[15 ] 是针对变量分离型反应函数进行了研究, Hutson 等[18 ] 是针对单调反应函数进行了研究. 2023 年 Lou 等[19 ] 针对一般的反应函数, 仅分析了单种群空间非均匀反应扩散模型, 未考虑种群之间的相互作用和竞争. 根据以上分析所发现的问题, 本文将针对一般的反应函数, 考虑如下的两种群空间非均匀反应扩散竞争模型
(1.1) $\left\{\begin{array}{l} \frac{\partial u}{\partial t}=\mu \Delta u+u f(u, v, x), \quad(x, t) \in \Omega \times(0, \infty), \\ \frac{\partial v}{\partial t}=\nu \Delta v+v g(u, v, x), \quad(x, t) \in \Omega \times(0, \infty), \\ \frac{\partial u}{\partial n}=\frac{\partial v}{\partial n}=0, \quad x \in \partial \Omega, \\ u(x, 0)=u_0(x), v(x, 0)=v_0(x), \quad x \in \bar{\Omega}. \end{array}\right.$
其中 $u$ $v$ $(t,x)$ $\mu>0$ $\nu>0$ $f(u,v,x)$ $g(u,v,x)$ $u_0$ $v_0$ $x$ $\Omega\subseteq\Bbb{R}^2$ $\partial\Omega$ $n$ $\partial\Omega$ $\Delta$
与反应扩散方程组 $(1.1)$
(1.2) $\left\{\begin{array} & \frac{\partial u}{\partial t}=uf(u,v,x),\ \ (x,t)\in\Omega\times(0,\infty),\\ \frac{\partial v}{\partial t}=vg(u,v,x),\ \ (x,t)\in\Omega\times(0,\infty),\\ u(x,0)=u_0(x),\ v(x,0)=v_0(x),\ \ x\in\bar\Omega. \end{array}\right.$
种群的反应函数依赖于种群密度、竞争种群密度以及空间变量. 在之前的研究中, 学者们会假设反应函数关于密度单调递减. 但是在实际的生态系统中, 当种群密度较小时, 资源相对丰富, 反应函数关于种群密度呈现单调递增趋势; 而随着种群密度增加, 资源不再充足, 出现种内竞争, 从而导致反应函数关于种群密度呈现单调递减趋势. 因此, 需要考虑反应函数关于种群密度不再单调的情况, 比如下面例 1.1 中所给出的反应函数.
例 1.1 考虑 $19$ $u$ $v$
(1.3) $\left\{\begin{array}{l} \frac{\partial u}{\partial t}=\mu \Delta u+u\left(\frac{7}{4}-u^2+u-\frac{1}{2} v+\frac{1}{2} \cos \left(x_1+x_2-1\right)\right), \quad(x, t) \in \Omega \times(0, \infty), \\ \frac{\partial v}{\partial t}=\nu \Delta v+v\left(2-u-v+\sin \left(x_1+x_2-1\right)\right), \quad(x, t) \in \Omega \times(0, \infty), \\ \frac{\partial u}{\partial n}=\frac{\partial v}{\partial n}=0, \quad x \in \partial \Omega, \\ u(x, 0)=u_0(x), \quad v(x, 0)=v_0(x), \quad x \in \bar{\Omega}, \end{array}\right.$
其中 $x=(x_1,x_2)$ $\Omega\subseteq\Bbb{R}^2$
在 $u\in (-\infty,\frac{1}{2})$ $u$ $u\in (\frac{1}{2},+\infty)$ $u$ $u$
本文的结构如下: 在第 2 节给出本文的主要结论; 在第 3 节介绍一些预备知识; 在第 4 节证明本文的主要结论; 在第 5 节通过满足相应假设的一个例子的数值结果验证定理结论的正确性; 最后在第 6 节总结全文, 并给出将来的工作展望.
2 主要结论
为了方便理解本文的主要结论, 现将参考文献[第 11 章]中的相关基本定义给出
定义2.1 对给定的 $\mu,\nu$ $(\tilde{u} (x;\mu,\nu),\tilde{v}(x;\mu,\nu))\ (\forall x\in\bar\Omega)$ $(\tilde{u}(x),\tilde{v}(x))$ ) 满足方程组(1.1), 则称 $(\tilde{u}(x),\tilde{v}(x))$
定义2.2 设 $(\tilde{u}(x),\tilde{v}(x))\ (\forall x\in\bar\Omega)$ $(u_0(x),v_0(x))$ $(u_0(x),v_0(x))$ $(u(t,x),v(t,x))$
则称平衡解 $(\tilde{u}(x),\tilde{v}(x))$ $(\tilde{u}(x),\tilde{v}(x))$ $(\tilde{u}(x),\tilde{v}(x))$
定义2.3 若 $(u^\star(x),v^\star(x))\ (\forall x\in\bar\Omega)$
定义2.4 设 $(u^\star(x),v^\star(x))\ (\forall x\in\bar\Omega)$ $(u_0(x),$ $v_0(x))$ $(u_0(x),v_0(x))$ $(u(t,x),v(t,x))$
则称平衡解 $(u^\star(x),v^\star(x))$ $(u^\star(x),v^\star(x))$ $(u^\star(x),v^\star(x))$
当反应函数与空间变量无关时, 即 $f(u,v,x)=\bar{f}(u,v),\ g(u,v,x)=\bar{g}(u,v)$ $(1.2)$ $(1.1)$ [18 ] , 这是自治模型的特有结论. 而对于空间非均匀的非自治模型, 相应的结论是需要验证的, 即反应方程组 $(1.2)$ $x$ $(1.1)$
一般来说, 任意给定一个反应扩散方程组, 相应的反应方程组的渐近行为对其渐近性研究帮助不大. 而对于较大扩散系数 $\mu$ $\nu$ [8 ] 给出了以下结论: 若其有一个 $L^{\infty}$ $\mu$ $\nu$
根据种群竞争特点, 本文对方程组 $(1.1)$
(H1) $f,g:C^1\times C^1\times \Omega\rightarrow\Bbb{R}$
(H2) 对$\forall x\in\bar\Omega$ $\bar u(x)>0$ $\forall v(x)\ge 0$
同时, 对$\forall x\in\bar\Omega$ $f_v(u,v,x)<0$
(H3) 对$\forall x\in\bar\Omega$ $g_u(u,v,x)<0$ $g_v(u,v,x)<0$
(H4) 存在一个正常数$M>0$ $\forall x\in\bar\Omega$
(H5) 对$\forall x\in\bar\Omega$ $f(u,v,x)=0$ $g(u,v,x)=0$ $(u^\star(x),v^\star(x))$
(H6) 对$\forall x\in\bar\Omega$ $(f_ug_v-f_vg_u)|_{(u,v,x)=(u^\star (x),v^\star(x),x)}>0$ .
注2.1 满足假设(H1)-(H6) 的反应函数是存在的, 现说明如下.
显然满足 (H1) 和 (H4), 其中可取正常数 $M\ge \frac{9}{2}$ .
对于 (H2) 和 (H3), $\forall x\in\bar\Omega$ $\forall u(x)\ge 0, v(x)\ge 0$
此外, 对 $\forall x\in\bar\Omega$ $\bar u(x)=\frac{1}{2}$ $\forall v(x)\ge 0$
对于 (H5) 和 (H6), 对 $\forall x\in\bar\Omega$
且$(f_ug_v-f_vg_u)|_{(u^\star (x),v^\star(x),x)}=\frac{\sqrt{21-8\sqrt{2}\sin{(x_1+x_2-1-\frac{\pi}{4})}}}{2}>0.$
所以在例 1.1 中, 关于反应函数的假设 (H5) 和 (H6) 也成立.
由文献[20 ]和[21 ]中的稳定性定理可知, 若假设 (H1)-(H6) 成立, 则反应方程组 (1.2) 有唯一的正平衡解 $(u^\star (x),v^\star(x))$
定理2.1 在假设 (H1)-(H6) 下, 存在一个足够小的正数 $\delta>0$ $\{\mu,\nu\}\le\delta$ $(\tilde{u}(x),\tilde{v}(x))$ $(u_0(x),v_0(x))$ $(\mu,\nu)$ $(0,0)$ $(\tilde{u}(x),\tilde{v}(x))$ $(u^\star (x),v^\star(x))$
3 预备知识
为了证明定理 2.1, 我们先在这一部分中讨论反应函数 $f(u,v,x)$ $g(u,v,x)$
引理3.1 若 (H2), (H3) 和 (H5) 成立, 则 $\forall x\in\bar\Omega$ $f(\bar u(x),0,x)>0$ $g(0,0,x)>0$ .
证 由 (H5) 知, $u^\star(x)$ $v^\star(x)$ $u^\star(x)>0$ $v^\star(x)>0$
$f(u^\star(x),v^\star(x),x)=0,\ g(u^\star(x),v^\star(x),x)=0$
而由 (H2) 和 (H3) 可知, 对 $\forall x\in\bar\Omega$ $f$ $g$ $v$
另一方面, 对 $\forall x\in\bar\Omega$ $u^\star(x)\ge\bar u(x)>0$ $\forall u(x)>\bar u(x)$ $f_u(u,v,x)<0$ $g_u(u,v,x)<0.$
(i) 存在唯一的连续可微函数 $\alpha(x)$ $\beta(x)$ $\forall x\in\bar\Omega, $
(ii) 对 $\forall x\in\bar\Omega$ $v_f=v_f(u,x),$
此外, 对 $\forall x\in\bar\Omega$ $v_f(u,x)$ $u\in [\bar u(x)]$ $u$ $u\ge \bar u(x)$ $u$
(iii) 对 $\forall x\in\bar\Omega$ $v_g=v_g(u,x), $
此外, $v_g(u,x)$ $u$
证 (i) 对 $\forall x\in\bar\Omega$
根据零点存在性定理及 (H2) 和 (H3), 可知必定存在唯一的函数 $\alpha(x)$ $\beta(x)$ $\forall x\in\bar\Omega, $ $\alpha(x)>\bar u(x),\ \beta(x)>0, $ $f(\alpha(x),0,x)=0,\ g(0,\beta(x),x)=0.$ $\alpha(x)>\bar u(x)$ $\beta(x)>0$
(ii) 由 (H1) 和 (H2) 及隐函数定理可知, 从 $f(u,v,x)=0$ $v_f=v_f(u,x)$ $f(u,v_f(u,x),x)\equiv 0. $
再由 (i) 中的结论 $f(\alpha(x),0,x)=0$ $v_f(\alpha(x),x)=0.$
再由 (H2) 可知 $\frac{\partial{f}}{\partial{v}}<0$ $\frac{\partial{v_f}}{\partial{u}}$ $\frac{\partial{f}}{\partial{u}}$ $v_f(u,x)$ $u\in [\bar u(x)]$ $u$ $u\ge \bar u(x)$ $u$
类似于对 (ii) 的证明, 可证得 (iii).
引理3.3 若 (H1)-(H6) 成立, 则对 $\forall x\in\bar\Omega$
进一步可得, $f(\bar u(x),\beta(x),x)>0,\ g(\alpha(x),0,x)>0$ .
证 构造辅助函数 $G(u,x)=v_f(u(x),x)-v_g(u(x),x)$ . 由 (H5) 以及引理 3.2 中 $v_f(u(x),x)$ $v_g(u(x),x)$ $\forall x\in\bar\Omega$
即 $G(u,x)$ $(u^\star(x),v^\star(x))$ $u$ $\epsilon>0$
(3.1) $G(u,x)\left\{\begin{array} &>0,\quad u\in (u^\star(x)-\epsilon, u^\star(x)), \\ <0,\quad u\in (u^\star(x),u^\star(x)+\epsilon). \end{array}\right. $
根据 (H5) 可知 $u^\star(x)$ $G(u(x),x)=0$ $G(u,x)$ $u^\star(x)$ $(3.1)$
对 $u>0$
由 (H2) 和 (H3) 可知$f(u,v,x)$ $u\in[\bar u(x)]$ $u$
类似可得 $g(\alpha(x),0,x)>0. $
4 定理 2.1 的证明
首先, 利用文献[18 ]中的证明, 我们可以得到方程组 (1.1) 的边界状态的不稳定性.
引理4.1 在定理 1.1 的假设下,存在一个足够小的正数 $\delta_1>0$ $ \mu,\nu \le\delta_1$ $(u,0)$ $(0,v)$
接下来, 利用上下解方法, 我们讨论方程组 $(1.1)$
引理4.2 在定理 1.1 的假设下, 令$(\tilde{u}(x),\tilde{v}(x))$ $\tilde{u}(x)>\bar u(x)$ $(\forall x\in\bar\Omega)$ $(\mu,\nu)\rightarrow(0,0)$ $(\tilde{u}(x),\tilde{v}(x))$ $\bar\Omega$ $(u^\star(x),v^\star(x))$ .
证 令 $\underline{v_0}=0$
(4.1) $\left\{\begin{array} &\nu\Delta v+vg(\tilde{u},v,x)=0,\\ \frac{\partial v}{\partial n}|_{\partial\Omega}=0.\end{array}\right.$
利用 (H2)-(H4), 易知 $\tilde{u}(x)$ $M$
(4.2) $\left\{\begin{array} &\mu\Delta u+uf(u,\underline{v_0},x)=0,\\ \frac{\partial u}{\partial n}|_{\partial\Omega}=0.\end{array}\right.$
由上下解方法可知, 边值问题 $(4.2)$ $\bar u_0(x)$
(4.3) $\bar u_0(x)\ge \tilde u(x).$
利用上下解方法和 $(4.3)$
(4.4) $\left\{\begin{array} &\nu\Delta v+vg(\bar u_0(x),v,x)=0,\\ \frac{\partial v}{\partial n}|_{\partial\Omega}=0 \end{array}\right.$
有一个解, 记作 $\underline{ v_1}(x)$
(4.5) $0=\underline{v_0}(x)\le\underline{ v_1}(x)\le \tilde v(x).$
最后, 可得两个单调序列 $\{\bar u_k\}|_0^\infty$ $\{\underline{v_k}\}|_0^\infty$ $({k\ge 1})$
此外, 对 $\forall x\in\bar\Omega$
和$ \tilde v(x)\ge\cdots\ge \underline{v_k}(x)\ge \underline{v_{k-1}}(x)\ge\cdots\ge\ \underline{v_1}(x)\ge \underline{v_0}(x). $
令 $\bar v_0(x)$ $ \left\{\begin{array} & \nu\Delta v+vg(0,v,x)=0,\\ \frac{\partial v}{\partial n}|_{\partial\Omega}=0 \end{array}\right. $ $\{\bar v_k\}|_0^\infty$ $\{\underline{u_k}\}|_1^\infty$ $({k\ge 1})$
此外, 对 $\forall x\in\bar\Omega$
和$ \tilde v(x)\le\cdots\le\bar v_k(x)\le\bar v_{k-1}(x)\le\cdots\le\bar v_1(x)\le\bar v_0(x)\le M. $
(4.6) $\begin{align*} &\bar u(x)\le\underline{u_1}(x)\le\cdots\le\underline{u_k}(x)\le\cdots \le \tilde{u}(x) \le\cdots\le\bar u_k(x)\le\cdots\le\bar u_1(x)\le\bar u_0(x), \\ &0\le\underline{v_1}(x)\le\cdots\le\underline{v_k}(x)\le\cdots\le \tilde{v}(x) \le\cdots\le\bar v_k(x)\le\cdots\le\bar v_1(x)\le\bar v_0(x). \end{align*}$
另一方面, 由零点存在性定理, 我们可以构造出四个单调序列 $\{\bar U_k(x)\}|_0^\infty$ $\{\bar V_k(x)\}|_0^\infty$ $\{ \underline{U_k}(x)\}|_1^\infty$ $\{ \underline{V_k}(x)\}|_1^\infty$ $(1)\ \bar U_0(x)=\alpha(x)$ $(2)\ \bar V_0(x)=\beta(x)$ $(3)\ g(\bar U_{k-1},\underline{V_k},x)=0$ $(4)\ f(\bar U_{k},\underline{V_k},x)=0$ $(5)\ f(\underline{U_k},\bar V_{k-1},x)=0$ $(6)\ g(\underline{U_{k}},\bar V_k,x)=0\ (k\ge 1).$
此外, 对 $\forall x\in\bar\Omega$
由序列的一致收敛定理可得, 在$x\in\bar\Omega$
(4.7) $\begin{array}\bar U_k\rightrightarrows u^\star(x),\quad \underline{U_k}\rightrightarrows u^\star(x), \quad \bar V_k\rightrightarrows v^\star(x),\quad \underline{V_k}\rightrightarrows v^\star(x). \end{array} $
同时, 容易看出, 当 $(\mu,\nu)\rightarrow(0,0)$ $(\bar u_k,\underline{v_k})\rightarrow(\bar U_k,\underline{V_k})$ $(\underline{u_k},\bar v_k)\rightarrow(\underline{U_k},\bar V_k), $ $\bar\Omega$ $(4.6)$ - $(4.7)$ $(\mu,\nu)\rightarrow(0,0)$ $(\tilde{u}(x),\tilde{v}(x))$ $\bar\Omega$ $(u^\star(x),v^\star(x))$ .
定义4.1 令 $(u(x),v(x))$ $(\xi(x,t),\eta(x,t))$ $(u(x), v(x))$ $t\rightarrow \infty$ $(\xi(x,t),\eta(x,t))$ $(u(x),v(x))$ [3 ] .
引理4.3 若 $(u(x),v(x))$ $(u(x),v(x))$
因此, 由引理 4.3, 只需证明方程组 $(1.1)$ $(\tilde{u}(x),\tilde{v}(x))\ (\tilde{u}(x)>\bar u(x), \forall x\in\bar\Omega)$
令 $\xi(x,t)=u(x,t)-\tilde{u}(x)$ $\eta(x,t)=v(x,t)-\tilde{v}(x)$ $u(x,t)$ $v(x,t)$ $(1.1)$
将 $u(x,t)=\xi(x,t)+\tilde{u}(x)$ $v(x,t)=\eta(x,t)+\tilde{v}(x)$ $(1.1)$ $(\tilde{u}(x),\tilde{v}(x))$
(4.8) $\left\{\begin{array} & \frac{\partial\xi}{\partial t}=\mu\Delta \xi+\xi\cdot (f(\tilde{u},\tilde{v},x)+\tilde{u} f_u(\tilde{u},\tilde{v},x))+\eta\cdot \tilde{u} f_v(\tilde{u},\tilde{v},x),\ \ (x,t)\in\Omega\times(0,\infty),\\ \frac{\partial\eta}{\partial t}=\nu\Delta \eta+\xi\cdot \tilde{v} g_u(\tilde{u},\tilde{v},x)+\eta\cdot(g(\tilde{u},\tilde{v},x)+ \tilde{v} g_v(\tilde{u},\tilde{v},x)),\ \ (x,t)\in \Omega\times(0,\infty),\\ \frac{\partial\xi}{\partial n}=\frac{\partial\eta}{\partial n}=0,\ \ x\in\partial\Omega,\\ \xi(x,0)=u_0(x)-\tilde{u}(x),\ \eta(x,0)=v_0(x)-\tilde{v}(x),\ \ x\in\bar\Omega, \end{array}\right.$
其中 $\xi(x,t)$ $\eta(x,t)$ $(4.8)$
为考虑该线性化方程组 $(4.8)$ $\xi(x,t)=\phi(x,t){\rm e}^{\lambda t}$ $\eta(x,t)=\psi(x,t){\rm e}^{\lambda t}$
(4.9) $\left\{\begin{array} \lambda\phi=\mu\Delta \phi+\phi\cdot (f(\tilde{u},\tilde{v},x)+\tilde{u} f_u(\tilde{u},\tilde{v},x))+\psi\cdot \tilde{u} f_v(\tilde{u},\tilde{v},x),\ \ x\in\Omega,\\ \lambda\psi=\nu\Delta \psi+\phi\cdot \tilde{v} g_u(\tilde{u},\tilde{v},x)+\psi\cdot(g(\tilde{u},\tilde{v},x)+ \tilde{v} g_v(\tilde{u},\tilde{v},x)),\ \ x\in \Omega,\\ \frac{\partial\phi}{\partial n}=\frac{\partial\psi}{\partial n}=0,\ \ x\in\partial\Omega. \end{array}\right.$
由假设 (H2), (H3) 和 (H6) 可知方程组 $(1.1)$ $(\tilde{u}(x),\tilde{v}(x))$ 18 ]中的方法和结论可得出矛盾, 从而可以得到如下引理
引理4.4 在定理 1.1 的假设下,存在一个足够小的正数 $\delta_2>0$ $\mu,\nu\le\delta_2$ $(\tilde{u}(x),\tilde{v}(x))\ (\tilde{u}(x)>\bar u(x), \forall x\in\bar\Omega)$
(4.10) $\left\{\begin{array} \mu\Delta\tilde{u}+\tilde{u}f(\tilde{u},\tilde{v},x)=0,\ \ x\in\Omega,\\ \nu\Delta\tilde{v}+\tilde{v}g(\tilde{u},\tilde{v},x)=0,\ \ x\in \Omega,\\ \frac{\partial\tilde{u}}{\partial n}=\frac{\partial\tilde{v}}{\partial n}=0,\ \ x\in\partial\Omega. \end{array}\right.$
由 (H2) 和 (H3) 可知, 方程组 $(4.10)$ $u(x)>\bar u(x)$ $(1.1)$ $u(x)>\bar u(x)$ $(\tilde{u}(x),\tilde{v}(x))$ .
由引理 4.1, 引理 4.3 和引理 4.4 可知, 存在一个足够小的正数$\delta=\min\{\delta_1,\delta_2\}>0, $ $\mu,\nu\le\delta$ $(1.1)$ $(\tilde{u}(x),\tilde{v}(x))$ $(\tilde{u}(x)>\bar u(x), \forall x\in\bar\Omega)$
又由引理 4.2 可知, 当 $(\mu,\nu)\rightarrow (0,0)$ $(1.1)$ $(\tilde{u}(x),\tilde{v}(x))$ $(\tilde{u}(x)>\bar u(x), \forall x\in\bar\Omega)$ $(u^\star(x),v^\star(x))$ .
5 结果验证
在第 2 节中已经证明, 例 1.1 中的反应函数满足假设(H1)-(H6). 下面通过此例的数值解验证定理 2.1 结论的正确性.
反应扩散方程组 $(1.3)$
(5.1) $\left\{\begin{array} & \frac{\partial u}{\partial t}=u\Big{(}\frac{7}{4}-u^2+u-\frac{1}{2}v+\frac{1}{2}\cos{(x_1+x_2-1)}\Big{)},\ \ (x,t)\in\Omega\times(0,\infty),\\ \frac{\partial v}{\partial t}=v\Big{(}2-u-v+\sin{(x_1+x_2-1)}\Big{)},\ \ (x,t)\in\Omega\times(0,\infty), \end{array}\right.$
方程组 (5.1) 的正平衡解 $(u^\star(x),v^\star(x))$
为保证 $u^\star(x)$ $v^\star(x)$ $\Omega=[\frac{1}{2}+\frac{\pi}{76},\frac{1}{2}+\frac{13\pi}{24}]^2$ .
由定理 2.1 可知, 当 $\mu$ $\nu$ $(1.3)$ $(\tilde{u}(x),\tilde{v}(x))$ $(u_0(x),v_0(x))$ $(\mu,\nu)\rightarrow(0,0)$ $(\tilde{u}(x),\tilde{v}(x))$ $\Omega$ $(4.1)$ $(u^\star(x),v^\star(x))$ .
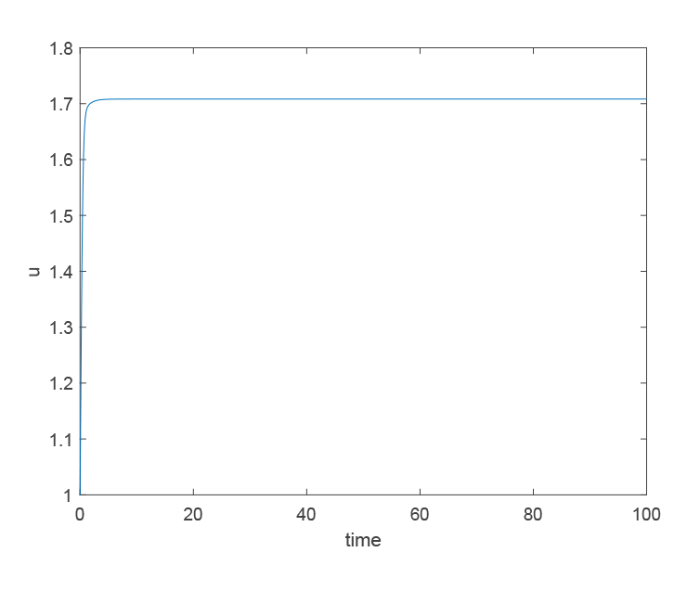
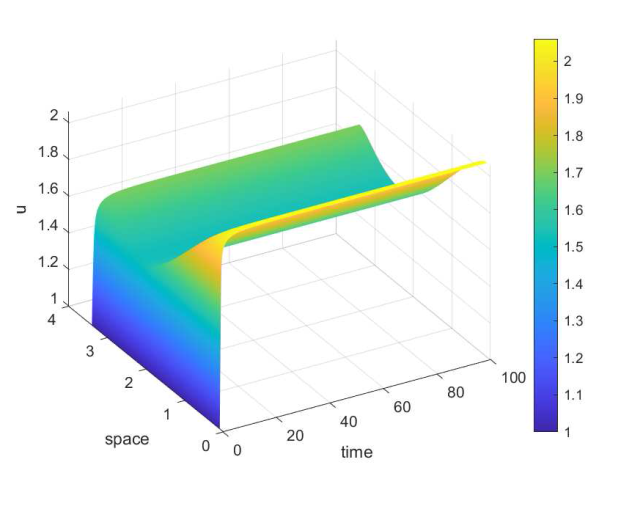
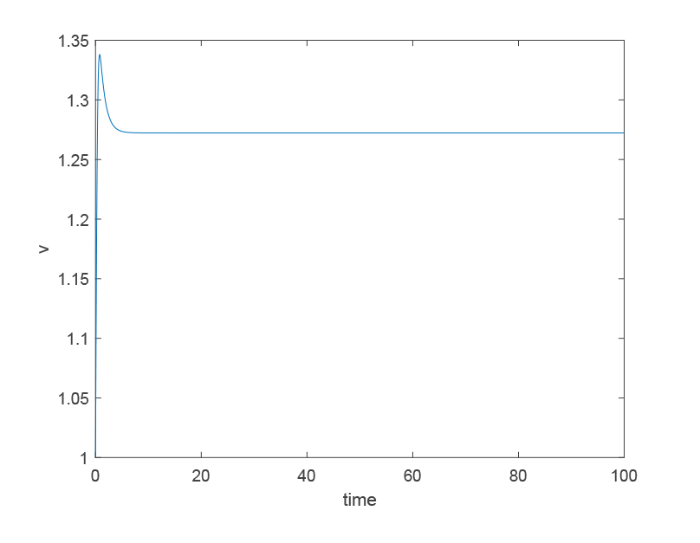
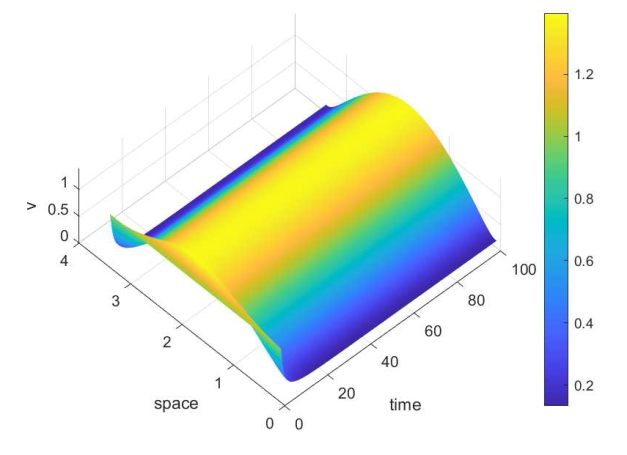
取 $\mu=0.002$ $\nu=0.001$ . 图 1 和图 3 分别是将 $x=(x_1,x_2)$ $(1.378,1)$ $u$ $v$ $t$ 图 2 和图 4 分别是将 $x_2$ $1$ $x_1$ $u$ $v$ $t$
图1
图1
在 $x=(1.378,1)$ $u$ $t$
图2
图2
在 $x_2=1$ $u$ $t$ $\mu=0.002$ $\nu=0.001$ )
图3
图3
在 $x=(1.378,1)$ $v$ $t$ $\mu=0.002$ $\nu=0.001$ )
图4
图4
在 $x_2=1$ $v$ $t$ $\mu=0.002$ $\nu=0.001$ )
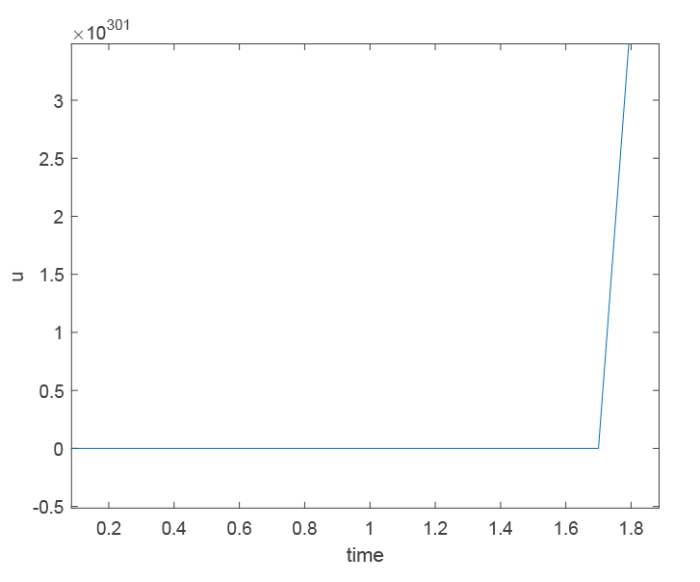
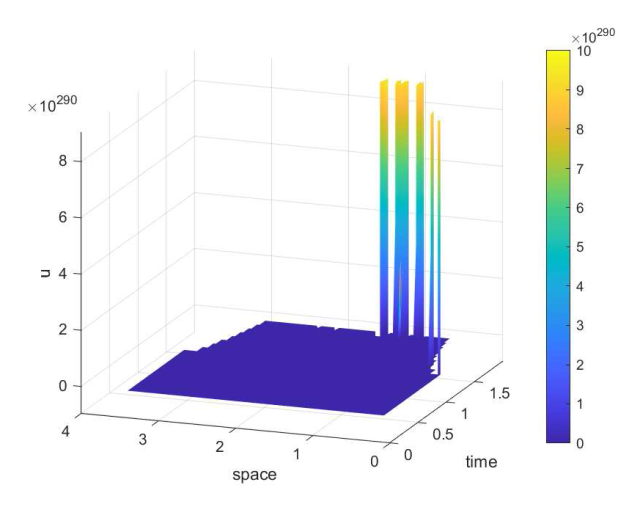
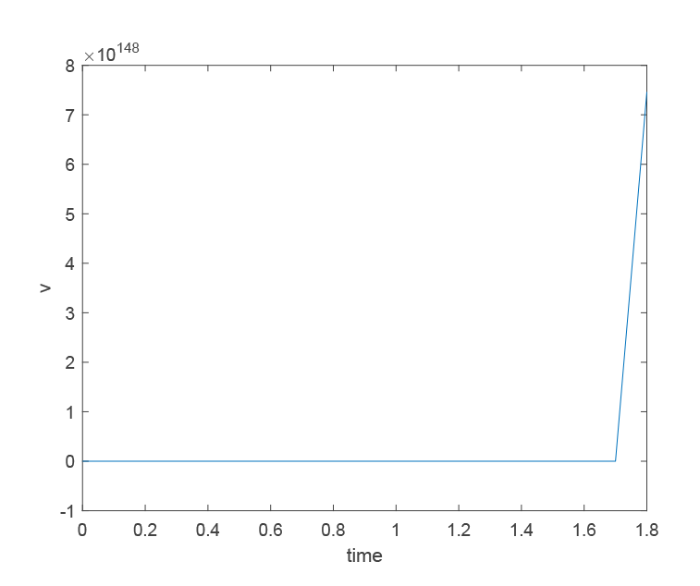
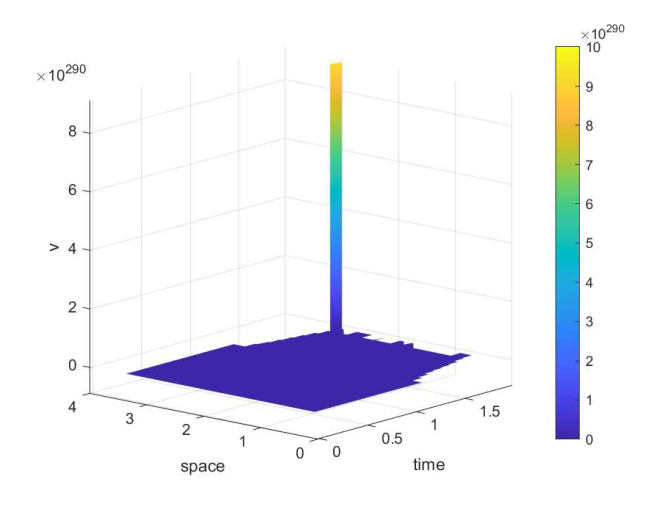
但是, 当扩散系数 $\mu$ $\nu$ $(1.1)$ $(1.2)$ 图 5 -8 展示了$\mu=0.09$ $\nu=0.08$ $u$ $v$ $(1.1)$
图5
图5
在 $x=(1.378,1)$ $u$ $t$ $\mu=0.09$ $\nu=0.08$ )
图6
图6
在 $x_2=1$ $u$ $t$ $\mu=0.09$ $\nu=0.08$ )
图7
图7
在 $x=(1.378,1)$ $v$ $t$ $\mu=0.09$ $\nu=0.08$ )
图8
图8
在 $x_2=1$ $v$ $t$ $\mu=0.09$ $\nu=0.08$ )
6 结论和展望
本文考虑了两种群竞争的空间非均匀反应扩散方程组构成的非自治模型, 将种群反应函数推广到更一般的非单调形式, 在合理性假设下证明了反应扩散方程组唯一正平衡解的存在性及其全局渐近稳定性, 由此得到了小扩散系数下, 非单调反应函数的空间非均匀反应扩散方程组的正平衡解全局收敛到相应反应方程组的正平衡解. 因此, 可以看出较小的扩散系数不影响种群的最终分布和竞争关系, 而且它们是由种群的反应方程组所决定的. 从种群可持续发展的角度看, 种群适当范围的扩散最终不会对生态平衡造成影响. 基于此, 我们可以构建预测具有竞争关系的两种群的竞争发展轨迹的理论, 将之用于研究物种的扩散或小范围入侵, 以及市场竞争等实际问题, 为生态学和经济学等相关领域的研究提供方法借鉴和理论依据.
对于空间非均匀反应扩散方程组, 后续还有许多工作值得进一步探索, 例如三种及以上种群竞争问题; 此外, 在研究中还可以加入时滞对反应函数的影响, 使相关理论更加完善.
参考文献
View Option
[1]
Volterra V . Fluctuations in the abundance of a species considered mathematically
Nature , 1926 , 1.8 2972 ): 558 -560
[本文引用: 1]
[2]
Lotka A J . Elements of Physical Biology
London: Dover , 1956
[本文引用: 1]
[3]
Smoller J . Shock Wave and Reaction-Diffusion Equations . 2nd Edition. New York : Springer-Verlag , 1994
[本文引用: 3]
[4]
Murray J D . Spatial Models and Biomedical Applications . New York : Springer-Verlag , 2003
[5]
Iannelli M Pugliese A . An Introduction to Mathematical Population Dynamics Along the Trail of Volterra and Lotka . Heidelberg : Springer International Publishing , 2014
[6]
Ma Z P Yue J L . Competitive exclusion and coexistence of a delayed reaction-diffusion system modeling two predators competing for one prey
Computers and Mathematics with Applications , 2016 , 71 9 ): 1799 -1817
[7]
Jia Y F . Coexistent States of Reaction-Diffusion Systems . Beijing : Science Press , 2017
[本文引用: 1]
[8]
Conway E Hoff D Smoller J . Large time behavior of solutions of systems of nonlinear reaction-diffusion model
SIAM Journal on Application Mathematics , 1978 , 35 1 ): 1 -16
[本文引用: 2]
[9]
Pacala S W Roughgarden J . Spatial heterogeneity and interspecific competition
Theoretical Population Biology , 1982 , 21 1 ): 92 -113
[10]
Hale J K Sakamoto K . Shadow systems and attractors in reaction-diffusion equations
Applicable Analysis , 1989 , 32 3/4 ): 287 -303
[11]
Hastings A . Spatial heterogeneity and ecological models
Ecology , 1990 , 71 2 ): 426 -428
[12]
Carvalho A N Hale J K Large diffusion with dispersion . Nonlinear Analysis , 1991 , 17 12 ): 1139 -1151
[13]
Holms E E Lewis M A Banks J E , et al . Partial differential equations in ecology: spatial interactions and population dynamics
Ecology , 1994 , 75 1 ): 17 -29
[14]
Cantrell R S Cosner C . On the effects of spatial heterogeneity on the persistence of interacting species
Journal of Mathematical Biology , 1998 , 37 4 ): 103 -145
[15]
Lou Y Nagylaki T . A semilinear parabolic system for migration and selection in population genetics
Journal of Differential Equations , 2002 , 1.1 2 ): 388 -418
[本文引用: 1]
[16]
Hutson V Lou Y Mischaikow K . Spatial heterogeneity of resources versus Lotka-Volterra dynamics
Journal of Differential Equations , 2002 , 1.5 1 ): 97 -136
[17]
Du Y H . Realization of prescribed patterns in the competition model
Journal of Differential Equations , 2003 , 1.3 1 ): 147 -179
[18]
Hutson V Lou Y Mischaikow K . Convergence in competition models with small diffusion coefficients
Journal of Differential Equations , 2005 , 2.1 1 ): 135 -161
[本文引用: 5]
[19]
Lou Y J Wang F B . A Reaction-diffusion model with spatially inhomogeneous delays
Journal of Dynamics and Differential Equations , 2023 , 30 1 ): 1 -16
[本文引用: 1]
[20]
Hess P . Periodic parabolic boundary value problems and positivity
Bulletin of The Londom Mathematical Society , 1992 , 24 6 ): 619 -620
[本文引用: 1]
[21]
Hsu S Smith H Waltman P . Competitive exclusion and coexistence for competitive systems on ordered Banach spaces
Transactions of the American Mathematical Society , 1996 , 3.8 10 ): 4083 -4094
[本文引用: 1]
Fluctuations in the abundance of a species considered mathematically
1
1926
... 种间竞争是不同物种之间为争夺资源而进行的一类竞争现象, 这类现象在现实世界中十分常见, 对它的研究, 在生态学和经济学等诸多领域内都具有重要的理论和实际意义. 自从美国生物数学家 Lotka 和意大利数学家 Volterra 提出著名的 Lotka-Volterra模型[1 ,2 ] 以来, 常微分模型便被学者们广泛用于种群问题的研究. ...
Elements of Physical Biology
1
1956
... 种间竞争是不同物种之间为争夺资源而进行的一类竞争现象, 这类现象在现实世界中十分常见, 对它的研究, 在生态学和经济学等诸多领域内都具有重要的理论和实际意义. 自从美国生物数学家 Lotka 和意大利数学家 Volterra 提出著名的 Lotka-Volterra模型[1 ,2 ] 以来, 常微分模型便被学者们广泛用于种群问题的研究. ...
3
1994
... 由于季节更替和资源枯竭, 迁徙和扩散已经成为许多种群的常态, 因此在模型中有必要考虑扩散因素的影响, 对具有扩散项的种间竞争偏微分模型的研究具有重要的理论和实际意义. 当前, 反应扩散方程组在生态学等领域应用广泛, 通常用抛物型偏微分方程来研究反应扩散问题. 在过去的数十年内, 种群动力学模型一直是生态学研究的热门主题之一, 而反应扩散方程组的正平衡解及其长期行为是种群动力学模型所研究的主要内容[3 7 ] . ...
... 定义4.1 令 $(u(x),v(x))$ $(\xi(x,t),\eta(x,t))$ $(u(x), v(x))$ $t\rightarrow \infty$ $(\xi(x,t),\eta(x,t))$ $(u(x),v(x))$ [3 ] . ...
... 由文献[3 ]中的稳定性定理, 有下述引理 ...
Competitive exclusion and coexistence of a delayed reaction-diffusion system modeling two predators competing for one prey
2016
1
2017
... 由于季节更替和资源枯竭, 迁徙和扩散已经成为许多种群的常态, 因此在模型中有必要考虑扩散因素的影响, 对具有扩散项的种间竞争偏微分模型的研究具有重要的理论和实际意义. 当前, 反应扩散方程组在生态学等领域应用广泛, 通常用抛物型偏微分方程来研究反应扩散问题. 在过去的数十年内, 种群动力学模型一直是生态学研究的热门主题之一, 而反应扩散方程组的正平衡解及其长期行为是种群动力学模型所研究的主要内容[3 7 ] . ...
Large time behavior of solutions of systems of nonlinear reaction-diffusion model
2
1978
... 现有的对空间非均匀反应扩散方程组的研究多是针对具有特殊性质的反应函数展开的[8 18 ] .例如, Lou 等[15 ] 是针对变量分离型反应函数进行了研究, Hutson 等[18 ] 是针对单调反应函数进行了研究. 2023 年 Lou 等[19 ] 针对一般的反应函数, 仅分析了单种群空间非均匀反应扩散模型, 未考虑种群之间的相互作用和竞争. 根据以上分析所发现的问题, 本文将针对一般的反应函数, 考虑如下的两种群空间非均匀反应扩散竞争模型 ...
... 一般来说, 任意给定一个反应扩散方程组, 相应的反应方程组的渐近行为对其渐近性研究帮助不大. 而对于较大扩散系数 $\mu$ $\nu$ [8 ] 给出了以下结论: 若其有一个 $L^{\infty}$ $\mu$ $\nu$
Spatial heterogeneity and interspecific competition
1982
Shadow systems and attractors in reaction-diffusion equations
1989
Spatial heterogeneity and ecological models
1990
Partial differential equations in ecology: spatial interactions and population dynamics
1994
On the effects of spatial heterogeneity on the persistence of interacting species
1998
A semilinear parabolic system for migration and selection in population genetics
1
2002
... 现有的对空间非均匀反应扩散方程组的研究多是针对具有特殊性质的反应函数展开的[8 18 ] .例如, Lou 等[15 ] 是针对变量分离型反应函数进行了研究, Hutson 等[18 ] 是针对单调反应函数进行了研究. 2023 年 Lou 等[19 ] 针对一般的反应函数, 仅分析了单种群空间非均匀反应扩散模型, 未考虑种群之间的相互作用和竞争. 根据以上分析所发现的问题, 本文将针对一般的反应函数, 考虑如下的两种群空间非均匀反应扩散竞争模型 ...
Spatial heterogeneity of resources versus Lotka-Volterra dynamics
2002
Realization of prescribed patterns in the competition model
2003
Convergence in competition models with small diffusion coefficients
5
2005
... 现有的对空间非均匀反应扩散方程组的研究多是针对具有特殊性质的反应函数展开的[8 18 ] .例如, Lou 等[15 ] 是针对变量分离型反应函数进行了研究, Hutson 等[18 ] 是针对单调反应函数进行了研究. 2023 年 Lou 等[19 ] 针对一般的反应函数, 仅分析了单种群空间非均匀反应扩散模型, 未考虑种群之间的相互作用和竞争. 根据以上分析所发现的问题, 本文将针对一般的反应函数, 考虑如下的两种群空间非均匀反应扩散竞争模型 ...
... [18 ]是针对单调反应函数进行了研究. 2023 年 Lou 等[19 ] 针对一般的反应函数, 仅分析了单种群空间非均匀反应扩散模型, 未考虑种群之间的相互作用和竞争. 根据以上分析所发现的问题, 本文将针对一般的反应函数, 考虑如下的两种群空间非均匀反应扩散竞争模型 ...
... 当反应函数与空间变量无关时, 即 $f(u,v,x)=\bar{f}(u,v),\ g(u,v,x)=\bar{g}(u,v)$ $(1.2)$ $(1.1)$ [18 ] , 这是自治模型的特有结论. 而对于空间非均匀的非自治模型, 相应的结论是需要验证的, 即反应方程组 $(1.2)$ $x$ $(1.1)$
... 首先, 利用文献[18 ]中的证明, 我们可以得到方程组 (1.1) 的边界状态的不稳定性. ...
... 由假设 (H2), (H3) 和 (H6) 可知方程组 $(1.1)$ $(\tilde{u}(x),\tilde{v}(x))$ 18 ]中的方法和结论可得出矛盾, 从而可以得到如下引理 ...
A Reaction-diffusion model with spatially inhomogeneous delays
1
2023
... 现有的对空间非均匀反应扩散方程组的研究多是针对具有特殊性质的反应函数展开的[8 18 ] .例如, Lou 等[15 ] 是针对变量分离型反应函数进行了研究, Hutson 等[18 ] 是针对单调反应函数进行了研究. 2023 年 Lou 等[19 ] 针对一般的反应函数, 仅分析了单种群空间非均匀反应扩散模型, 未考虑种群之间的相互作用和竞争. 根据以上分析所发现的问题, 本文将针对一般的反应函数, 考虑如下的两种群空间非均匀反应扩散竞争模型 ...
Periodic parabolic boundary value problems and positivity
1
1992
... 由文献[20 ]和[21 ]中的稳定性定理可知, 若假设 (H1)-(H6) 成立, 则反应方程组 (1.2) 有唯一的正平衡解 $(u^\star (x),v^\star(x))$
Competitive exclusion and coexistence for competitive systems on ordered Banach spaces
1
1996
... 由文献[20 ]和[21 ]中的稳定性定理可知, 若假设 (H1)-(H6) 成立, 则反应方程组 (1.2) 有唯一的正平衡解 $(u^\star (x),v^\star(x))$



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}