1 引言
自然界中的种群通过复杂的种间相互作用形成动态关联. 在生态系统中, 一种生物以另一种生物为食的种间关系称为捕食. 捕食是生物获取能量和营养物质的主要方式之一,其能起到优胜劣汰、协同进化, 进而达到维护生态系统稳定的作用. 近年来,很多学者对刻画两种群动态演化的捕食-食饵模型的动力学性质进行了研究[1 4] .
生态学家们发现, 当食饵稀缺时, 捕食者的繁殖率会显著下降, 这表明捕食者的环境容纳量与食饵密度成正比, 即捕食者的种群增长率受食饵密度的限制[5 ] 基于此, Leslie 和 Gower 在文献 [6 ] 中研究了一个随机的捕食-食饵模型, 即现在广为所知的 Leslie-Gower 模型. 经典的 Leslie-Gower 模型具有如下形式
其中 $u(t)$ 和 $v(t)$ 分别表示 $t$ 时刻食饵与捕食者的密度, $\frac{\gamma v}{u}$ 项表示捕食者的环境承载量与食饵种群的密度成正比. 该模型因能准确刻画捕食者的环境承载量受食饵密度制约, 受到了学者们广泛的研究[7 9] .
在生态系统中,食饵种群密度的变化对于捕食者种群增长率的影响不是瞬时发生的,而是有一定的延迟时滞,这表明捕食者种群的当前增长率依赖于过去某一时刻食饵的密度, 时滞对于捕食- 食饵模型的影响不能被忽略[11 ,12 ] . 此外,在研究某有限区域内种群的数量变化时,研究者们发现种群密度随空间位置不同而有所变化[12 14] ,种群中的个体也会在栖息区域内进行随机运动, 将种群在空间区域的自由扩散考虑到捕食-食饵模型后,能更好地反映自然界中种群动态的时空演化过程.
近年来,研究者们发现, 食饵种群个体间的种内竞争压力不仅来自附近个体, 还来自一定空间范围内甚至整个种群中其他个体的累积影响[15 17] . 这与传统模型中假设食饵群体的种内竞争只与个体紧邻的同类有关不同. 这种 “非局部竞争” 对于刻画某些食饵种群的种内竞争更准确. 为了更好地刻画这种 ``非局部" 种内竞争项, 非局部的空间核函数常常被考虑到模型中, 其一般形式为
其中 ${\Omega}$ 为种群所在的空间区域, $W(x,y)$ 是一般的空间核函数.当空间核函数为 Dirac 函数, 即 $W(x,y)=\delta(x-y)$ 时, 相应的非局部效应被弱化, 所研究的种群模型变为不具非局部效应的模型. 常用的空间核函数有如下三种
$\begin{aligned} &(\text{I})~~~ W(x,y)=\frac{1}{|\Omega|};\\ &(\text{II})~~~ W(x,y)=\frac{1}{l\pi}+\mu\cos(x-y);\\ &(\text{III})~~~ W(x,y)=g_1(x)g_2(y). \end{aligned}$
其中,上述第 $(\text{I})$ 种核函数称为空间平均核函数. 本文将借助此类空间平均核函数来刻画食饵种群个体的非局部竞争, 进而研究捕食者与食饵种群的动态演化过程.
综上, 为了更准确的刻画生态系统中的捕食-食饵种群间的相互作用,我们考虑具非局部竞争和时滞的 Leslie-Gower 模型, 在一个封闭的有界光滑域 $\Omega$ 中, 研究如下的模型
(1.1) $\left\{\begin{array}{ll}u_{t}=d_{1} \Delta u+u\left(1-\frac{1}{|\Omega|} \int_{\Omega} u(y, t) \mathrm{d} y\right)-m u v, & x \in \Omega, t>0, \\v_{t}=d_{2} \Delta v+c v\left(1-\frac{v(x, t-\tau)}{u(x, t-\tau)}\right), & x \in \Omega, t>0, \\\partial_{\nu} u=\partial_{\nu} v=0, & x \in \partial \Omega, t>0, \\u(x, t)=u_{0}(x, t)>0, v(x, t)=v_{0}(x, t) \geq 0, & x \in \Omega, t \in[-\tau, 0].\end{array}\right.$
其中 $u(x,t)$ 和 $v(x,t)$ 分别表示 $t$ 时刻 $x$ 处食饵与捕食者的种群密度, 拉普拉斯算子 $\Delta$ 表示扩散效应, $d_i(i = 1, 2)$ 分别为食饵与捕食者种群的自由扩散率, $m$ 表示捕食率, 栖息地 $\Omega \in \mathbb{R}^n$ 是一个有界光滑域, $\nu$ 是区域边界 $\partial\Omega$ 上的单位外法向量. 本文考虑 $\Omega$ 为规范化的空间一维域 $(0, l\pi)$, 记 $\hat{u}(t)=\frac{1}{|\Omega|}\int_{\Omega}{u(y,t)}{\rm d}y$.
作为一类典型的捕食-食饵模型, Leslie-Gower 模型因其丰富的动力学特性而受到广泛研究. 对于不具扩散的 Leslie-Gower 模型, Braza 在文献 [18 ] 中借助双时序法研究了此类模型的分支结构, 证明了 Hopf 分支及不稳定极限环的存在性; Xiang 等在文献 [19 ] 中分析了一类考虑食饵避难所的 Leslie-Gower 模型, 证明了退化 Hopf 分支与退化 Bogdanov-Takens 分支、周期轨和同宿环的存在性. 目前国内外关于该系统的分支研究绝大多数局限于由单参数驱动的 Hopf 分支, 而关于双参数驱动的 Hopf-Hopf 分支研究较少.
在本文中, 将借助线性稳定性理论与分支理论来研究单参数以及双参数变化对于模型 (1.1) 中常值稳态解稳定性的影响. 首先,我们借助几何判据法分析了特征方程根的分布情况, 研究了各稳态解的局部稳定性.此外,以时滞 $\tau$ 和 $m$ 为变化参数, 探究了系统 Hopf 分支以及 Hopf-Hopf 分支的存在性. 分析表明, 在一定条件下,系统会有一列 Hopf 分支点. 当参数满足一定条件时, Hopf-Hopf 分支点也存在.本文结构如下: 在第 2 节通过特征方程根的分布对所研究模型进行了稳定性与分支分析. 第 3 节,利用中心流形理论, 推导出决定 Hopf-Hopf 分支性质的计算公式. 最后, 利用数值模拟验证了所得到理论结果.
2. 稳定性和分支分析
本小节将详细分析模型 (1.1) 中常值解的稳定性以及模型中 Hopf 分支的存在性. 下面考虑定义在一维有限空间域 $\Omega=(0,l\pi)$ 上的模型 (1.1).显然, 模型 (1.1) 的常值稳态解满足
(2.1) $\left\{\begin{array}{l}u(1-u)-m u v=0, \\c v\left(1-\frac{v}{u}\right)=0.\end{array}\right.$
求解方程 (2.1), 可得模型 (1.1) 具有一个边界常值稳态解 $E_0=(1, 0)$ 以及一个正常值稳态解 $E_*=(u_*, v_*)$, 其中 $u_*=v_*=\dfrac{1}{m+1}$.
其复化空间 $X_{\mathbb{C}}$: $ X_{\mathbb{C}}=\{x_1+{\rm i}x_2: x_1,x_2\in X\}, $ 相应地, $X_{\mathbb{C}}$ 具复值 $L^2$ 内积,即当$U=(u_1,v_1)^T\in X_{\mathbb{C}}$, $V=(u_2,v_2)^T\in X_{\mathbb{C}}$ 时, $\langle U,V \rangle=\int_0^{l\pi}(\bar{u}_1v_1+\bar{u}_2v_2){\rm d}x,$ 令 $\mathcal{C}:=C([-\tau, 0], X)$, 则在上确界范数 下 $\mathcal{C}$ 是一 Banach 空间, 且是 (1) 式的相空间.
记 $\hat{u}=\frac{1}{l\pi}\int_0^{l\pi}u(y,t){\rm d}y$, 于是可将模型 (1.1) 写成如下抽象微分方程的形式
(2.2) $\dfrac{{\rm d}U(t)}{{\rm d}t}=D\Delta U(t)+\mathcal{F}(U_t),$
不妨设 $U_0=(u_0,v_0)$ 为模型 (1.1) 的任意常值稳态解,即 $U_0$ 可为 $E_0$ 或 $E_*$,则其满足 $\mathcal{F}(U_0)=0$. 定义有界线性算子$\mathcal{L}:=D_{U}\mathcal{F}(U_0)$, 其中 $D_{U}\mathcal{F}(U_0)$ 表示 $\mathcal{F}(\varPhi)$ 关于 $\varPhi$ 在 $\varPhi=U_0$ 处的 Fr$\acute{\rm e}$chet 导数. 由此, 方程 (2.2) 在 $\varPhi=U_0$ 处的线性化方程为
(2.3) $\dfrac{{\rm d}U(t)}{{\rm d}t}=D\Delta U(t)+\mathcal{L}(U_t).$
直接计算得,线性算子$\mathcal{L}(\varPhi)$ 可表示为$\mathcal{L}(\varPhi)=L_1\varPhi(0)+L_2\varPhi(-\tau)+L_3\hat{\varPhi}(0)$ 的形式, 其中$L_1, L_2, L_3$ 可由算子 $\mathcal{F}(\varPhi)$ 计算得到
(2.4) $L_{1}=\left(\begin{array}{cc}\alpha_{11} & \alpha_{12} \\0 & \alpha_{22}\end{array}\right), L_{2}=\left(\begin{array}{cc}0 & 0 \\c_{21} & c_{22}\end{array}\right), L_{3}=\left(\begin{array}{cc}\beta_{11} & 0 \\0 & 0\end{array}\right),$
对于方程 (2.3) 中的拉普拉斯算子 $\Delta$, 考虑如下特征值问题$\Delta \varphi(x)= \sigma \varphi(x),~x\in (0,l\pi),~\varphi'(0)=\varphi'(l\pi)=0,$直接计算可得,拉普拉斯算子$\Delta$ 的特征值为 对应的特征函数可取为
将二维实数域 $\mathbb{R}^2$ 中的两个单位坐标向量分别记为 $e_1=(1,0)^T, e_2=(0,1)^T$. 记向量 $\beta_n^i(x)=\xi_n(x)e_i~(i=1,2)$, 显然, $\beta_n^i$ 是算子$D\Delta$ 对应于特征值 $-d_i\frac{n^2}{l^2}$ 的特征函数. 根据椭圆算子的基本理论, 可知向量组 $\{\beta_n^i\}_{n\in\mathbb{N}_0}$ 构成了空间 $X$ 的一组正交基.
另外, 带有边界条件$\partial_{\nu}u=\partial_{\nu}v=0$的方程 (2.3) 的特征方程为
(2.5) $\lambda U-D\Delta U-L_1U-L_2e^{\lambda\cdot}U-L_3\hat{U}=0,$
其中 $\hat{U}=\frac{1}{l\pi}\int_0^{l\pi}{U}{\rm d}x$. 又因为
(2.6) $\begin{cases}\text{det}\left(\lambda I-L_1-L_2e^{-\lambda\tau}-L_3 \right)=0, & n=0,\\\text{det}\left(\lambda I+\dfrac{n^2}{l^2}D-L_1-L_2e^{-\lambda\tau}\right)=0, & n\ge1.\end{cases}$
由线性稳定性理论知,若方程 (2.6) 的根均具有负实部,则 $(u_0,v_0)$ 是渐近稳定的; 若方程 (2.6) 有一个根具有正实部, 则 $(u_0,v_0)$ 是不稳定的; 若方程 (2.6) 有零实部特征根,其余特征根均具有负实部,那么稳态解 $(u_0,v_0)$ 的渐近稳定性不能直接由该线性系统决定.通过分析在 $E_0$ 处特征方程根的分布,可得如下关于 $E_0$ 稳定性的定理 2.1. 因证明较简单,此处略去.
定理 2.1 对模型 (1.1), 稳态解 $E_0(1,0)$ 是不稳定的.对于生态系统中的种群模型, 正常值稳态解的稳定性通常意味着两生物种群能长期共存,因此,研究正常值稳态解 $E_*$ 的稳定性更具有现实意义.本节后半部分将探究 $E_*$ 的渐近稳定性及模型 (1.1) 的 Hopf 分支的存在性.
定理 2.2 当 $\tau=0$ 时, 模型 (1.1) 的正常值稳态解 $E_*(\dfrac{1}{m+1},\dfrac{1}{m+1})$ 是渐近稳定的.
证 当 $\tau=0$ 时, $E_*$ 所对应的特征方程为
(2.7) $\begin{cases}\lambda^2+(c+\frac{1}{m+1})\lambda+c=0, & n=0,\\\lambda^2+[(d_1+d_2)\frac{n^2}{l^2}+c]\lambda+d_1\frac{n^2}{l^2}(d_2\frac{n^2}{l^2}+c)+\frac{mc}{m+1}=0, & n\ge1.\end{cases}$ (2.7) 式中所有的特征根均具有负实部, 故 $E_*$ 渐近稳定.
下面将以时滞 $\tau$ 为参数, 探究随着 $\tau$ 增加, $E_*$ 的稳定性是否会发生变化, 进而探究模型 (1.1) 是否存在 Hopf 分支.
为方便起见, 现将模型 (1.1) 在 $E_*$ 处的特征方程重写如下
(2.8) $D_n(\lambda;\tau):=P_n(\lambda)+Q_n(\lambda)e^{-\lambda \tau}=0,~~~n\in\mathbb{N}_0,$其中 $n=0$ 以及 $n\ge1$ 时对应的 $P_n(\lambda),Q_n(\lambda)$ 分别为
(2.9) $\begin{array}{lll}P_0(\lambda)=\lambda^2+\frac{1}{m+1}\lambda, &Q_0(\lambda)=c\lambda+c, \\P_n(\lambda)=\lambda^2+(d_1+d_2)\frac{n^2}{l^2}\lambda+d_1d_2\frac{n^4}{l^4}, &Q_n(\lambda)=c\lambda+c(d_1\frac{n^2}{l^2}+\frac{m}{m+1}).\end{array}$ 显然, 特征方程 (2.8) 为超越方程, 不易直接算得特征根的分布情况.因此, 在分析特征根的分布情况之前, 首先给出如下引理2.1[20 ,21 ] , 这个引理保证了特征方程 (2.8) 的根连续依赖于方程中的参数 $\tau$.
引理 2.1 当 $\tau$ 在 $\mathbb{R}_+$ 中连续变化时,特征方程 $D_n(\lambda;\tau)=0$ 在右半复平面 $\mathbb{C}_+$ 上根的重数之和只有在虚轴出现根或有根穿过虚轴时才会发生变化.
随着 $\tau$ 从 0 开始变大,如果模型 (1.1) 中的正常值稳态解 $E_*$ 保持局部稳定,则对应特征方程 (2.8) 的根均应始终具负实部. 若正常值稳态解 $E_*$ 的稳定性会随着 $\tau$ 的增加而发生变化,则一定存在某个 $n\in\mathbb{N}_0$ 及 $\tau>0$, 使得特征方程 (2.8) 具有一对纯虚根 $\pm{\rm{i}}\omega (\omega>0)$.
将 $\lambda={\rm{i}}\omega~(\omega>0) $ 代入方程 (2.9), 可得 $F_n(\omega)=|P_n({\rm{i}\omega})|^2-|Q_n({\rm{i}\omega})|^2=0.$ 结合方程 (2.9), 直接计算得
(2.10) $F_n(\omega)=\begin{cases}\omega^4+\left[\frac{1}{(m+1)^2}-c^2\right]\omega^2-c^2, & n=0,\\\omega^4+\left[(d_1^2+d_2^2)\frac{n^4}{l^4}-c^2\right]\omega^2+(d_1d_2\frac{n^4}{l^4})^2-c^2(d_1\frac{n^2}{l^2}+\frac{m}{m+1})^2, & n\ge1.\end{cases}$ 当 $n=0$ 时, $F_0(\omega)=0$ 始终有唯一的正根.将此唯一的正根记做 $\omega_0$, 计算可得
将相应特征值 $\lambda={\rm i}\omega_0$ 代入特征方程 (2.8) 中, 分离所得方程中的实部与虚部, 有 (2.11) $\begin{cases}\sin(\omega_0\tau)=\dfrac{\omega_0(\omega_0^2+\frac{1}{m+1})}{c(1+\omega_0^2)}, \\\cos(\omega_0\tau)=\dfrac{\frac{m}{m+1}\omega_0^2}{c(1+\omega_0^2)}.\end{cases}$
当 $\tau$ 满足方程 (2.11) 时, $E_*$ 的特征方程有纯虚根,此时的时滞 $\tau$ 即为可疑的 Hopf 分支点.又因为三角函数具有周期性, 对于 $\omega_0$, 总有可列个 $\tau>0$ 使 (2.11) 式成立. 将这一列 $\tau$ 记为 $\tau_{0,j}$, 有
(2.12) $\tau_{0,j}=\frac{\arcsin\left[\frac{\omega_0(\omega_0^2+\frac{1}{m+1})}{c(1+\omega_0^2)}\right]+2j\pi}{\omega_0}, ~~~~j\in\mathbb{N}_0.$ 当 $n\ge1$ 时, 关于方程 $F_n(\omega)=0$中正根 $\omega$ 的数量, 有如下结论.
定理 2.3 对方程 $F_n(\omega)=0$, 存在某个正整数 $n_0$, 当 $n\ge n_0$ 时, 方程没有正根; 当 $n< n_0$ 时, 方程至多有一个正根.
证 由方程 (2.10) 知, 当 $n\ge1$ 时,
令 $x=\omega^2$, 定义
(2.13) $F_n(x):=x^2+\left[(d_1^2+d_2^2)\frac{n^4}{l^4}-c^2\right]x+(d_1d_2\frac{n^4}{l^4})^2-c^2(d_1\frac{n^2}{l^2}+\frac{m}{m+1})^2.$ 显然, $F_n(\omega)=0$ 中正根的数量与 $F_n(x)=0$ 中正根的数量一致. 又因 $F_n(x)$ 为 $x$ 的一元二次函数,则方程 $F_n(x)=0$ 中正根的数量可分如下三种情况
(i) 函数 $F_n(x)$ 满足 $F_n(0)<0$;此时, 方程 $F_n(x)=0$ 有且仅有一个正根 $x_n$. 相应地, 方程 $F_n(\omega)=0$ 也有且仅有一个正根 $\omega_n=\sqrt{x_n}$.
(ii) $F_n(0)\ge0$ 且函数 $F_n(x)$ 的对称轴小于等于 0;此时, 方程 $F_n(x)=0$ 无正根. 相应地, 方程 $F_n(\omega)=0$ 也无正根.
(iii) $F_n(0)\ge0$ 且函数 $F_n(x)$ 的对称轴大于 0.
在此条件下, 方程 $F_n(x)=0$ 可能没有正根, 也可能有一个或者两个正根. 事实上, 对于方程 (2.13), 此情形不会发生, 下面借助反证法来证明该结论.
反设情形 (iii) 成立, 由方程 (2.13) 知, 应有
通过计算可得
然而, 上述不等式左边数值严格大于右边数值, 构成矛盾. 故假设不成立, 即情形 (iii) 不会出现.
由 $F_n(0)=(d_1d_2\frac{n^4}{l^4})^2-c^2(d_1\frac{n^2}{l^2}+\frac{m}{m+1})^2$ 可知, 当正整数 $n>(l^2[\frac{cd_1+\sqrt{(cd_1)^2+4d_1d_2mc/(m+1)}}{2d_1d_2}])^{\frac{1}{2}}$ 时, $F_n(0)>0$ 恒成立. 这表明, 存在正整数 $n_0\in\mathbb{N}$, 当 $n\ge n_0$ 时, 方程 $F_n(x)=0$ 没有正根, 也即方程 $F_n(\omega)=0$ 没有正根; 当 $n<n_0$ 时, 结合情形 {(i)} 可知, 方程 $F_n(x)=0$ 至多有一个正根, 也即 $F_n(\omega)=0$ 至多有一个正根.
注 2.1 在给定参数条件下, 定理 2.3 中的 $n_0$ 或为 1, 此时对所有 $n\ge1$, $F_n(\omega)=0$ 均没有正根.
当模型 (1.1) 中的参数 $d_1,~d_2,~c,~m,~l$ 以及正整数 $n$ 满足 $F_n(0)<0$ 时, $F_n(\omega)=0$ 始终有唯一的正根. 将此正根记做$\omega_n$, 可得
(2.4) $\omega_n=\left\{\frac{c^2-(d_1^2+d_2^2)\frac{n^4}{l^4}+\sqrt{[c^2-(d_1^2+d_2^2)\frac{n^4}{l^4}]^2-4[(d_1d_2\frac{n^4}{l^4})^2-c^2(d_1\frac{n^2}{l^2}+\frac{m}{m+1})^2]}}{2}\right\}^{\frac{1}{2}}.$将特征值 $\lambda={\rm i}\omega_n$ 代入特征方程 (2.8) 中, 分离所得方程中的实部与虚部, 有
(2.15) $\begin{cases}\sin(\omega_n\tau)=\dfrac{\omega_n(d_1\frac{n^2}{l^2}+\frac{m}{m+1})(d_1+d_2)\frac{n^2}{l^2}+(\omega_n^2-d_1d_2\frac{n^4}{l^4})\omega_n}{c(d_1\frac{n^2}{l^2}+\frac{m}{m+1})^2+c\omega_n^2}, \\\cos(\omega_n\tau)=-\dfrac{(d_1\frac{n^2}{l^2}+\frac{m}{m+1})(d_1d_2\frac{n^4}{l^4}-\omega_n^2)+(d_1+d_2)\frac{n^2}{l^2}\omega_n^2}{c(d_1\frac{n^2}{l^2}+\frac{m}{m+1})^2+c\omega_n^2}:\triangleq\chi.\end{cases}$ 当 $\tau$ 满足方程 (2.15) 时, 特征方程 (2.8) 有纯虚根, 此时的时滞 $\tau$ 是可疑的 Hopf 分支点. 通过直接计算可得, 方程 (2.15) 中的 $\sin(\omega_n\tau)>0$, 而 $\cos(\omega_n\tau)$ 的正负不确定. 因此, 对于满足方程 (2.15) 的 $\tau$, 有如下结论.
定理 2.4 若 $F_n(\omega)=0$ 在 $n\ge 1$ 时有满足 (2.15) 的正根 $\omega_n$, 则 $\tau=\tau_{n,j}$ 为系统 (1.1) 可能的 Hopf 分支点, 其中 $\tau_{n,j}$ 满足
(2.16) $\tau_{n,j}=\frac{\tfrac{\pi}{2}+\Big\{\arcsin\big[\frac{\omega_n(d_1\frac{n^2}{l^2}+\frac{m}{m+1})(d_1+d_2)\frac{n^2}{l^2}+(\omega_n^2-d_1d_2\frac{n^4}{l^4})\omega_n}{c(d_1\frac{n^2}{l^2}+\frac{m}{m+1})^2+c\omega_n^2}\big]-\tfrac{\pi}{2}\Big\}\text{sign}(\chi)+2j\pi}{\omega_n}, ~~~~j\in\mathbb{N}_0.$证 (1) 若 $\cos(\omega_n\tau)>0$, 则 $\omega_n\tau\in(2j\pi,\frac{\pi}{2}+2j\pi)$, 其中 $j\in\mathbb{N}_0$. 此时有可列个 $\tau>0$ 使 (2.15) 成立,将这可列个 $\tau$ 记为 $\tau_{n,j}$, 有
(2.17) $\tau_{n,j}=\frac{\arcsin\left[\frac{\omega_n(d_1\frac{n^2}{l^2}+\frac{m}{m+1})(d_1+d_2)\frac{n^2}{l^2}+(\omega_n^2-d_1d_2\frac{n^4}{l^4})\omega_n}{c(d_1\frac{n^2}{l^2}+\frac{m}{m+1})^2+c\omega_n^2}\right]+2j\pi}{\omega_n}, ~~~~j\in\mathbb{N}_0;$ (2) 若 $\cos(\omega_n\tau)\le 0$ 时, 有 $\omega_n\tau\in[\frac{\pi}{2}+2j\pi,\pi+2j\pi)$, 其中$j\in\mathbb{N}_0$. 此时有可列个 $\tau>0$ 使 (2.15) 式成立, 将这可列个 $\tau$ 记为
$\tau_{n,j}$, 有
(2.18) $\tau_{n,j}=\frac{\pi-\arcsin\left[\frac{\omega_n(d_1\frac{n^2}{l^2}+\frac{m}{m+1})(d_1+d_2)\frac{n^2}{l^2}+(\omega_n^2-d_1d_2\frac{n^4}{l^4})\omega_n}{c(d_1\frac{n^2}{l^2}+\frac{m}{m+1})^2+c\omega_n^2}\right]+2j\pi}{\omega_n}, ~~~~j\in\mathbb{N}_0.$ 结合方程 (2.17) 及 (2.18), 得 $\tau_{n,j}$ 可由方程 (2.16) 表示. 证毕.由上述定理 2.4 知, 对于方程 $F_n(\omega)=0$ 中的正根 $\omega_n$, 总存在可列个 $\tau_{n,j}>0$ 使方程 (2.15) 成立. 进而, 可得如下结论.
引理 2.2 对于特征方程 (2.8), 一定存在正整数 $N_0$, 当 $n\in\{0,1,\cdot\cdot\cdot,N_0-1\}$ 时, 在 $\tau=\tau_{n,j}$ 处,方程 (2.8) 存在一对纯虚根 $\pm{\rm i}\omega_n$. 其中 $\tau_{n,j}$ 由方程 (2.12) 或 (2.16) 定义; 当 $n\ge N_0$ 时, 方程 (2.8) 没有纯虚根.
令 $\lambda(\tau)$ 为方程 (2.8) 中满足 ${\rm{Re}}\lambda(\tau_{n,j})=0$ 和 ${\rm{Im}}\lambda(\tau_{n,j})=\omega_n$ 的特征根. 我们想要分析在 $\tau$ 增大时, 该特征根的实部是否会穿过虚轴, 变成具有正实部的特征根, 这就需要讨论 ${\rm{Re}}\lambda'(\tau_{n,j})$ 的正负. 关于 ${\rm{Re}}\lambda'(\tau_{n,j})$ 的符号, 有如下结论.
引理 2.3 当 $\tau=\tau_{0,j}$ 时, 始终有 ${\rm{Re}}\lambda'(\tau_{0,j})>0$.
证 当 $\tau=\tau_{0,j}$ 时, 对应特征方程为 $n=0$ 的情形. 将 $\lambda=\lambda(\tau)$ 代入特征方程 (2.8), 并在方程两边同时关于 $\tau$ 求导, 可得
结合方程 (2.8), (2.9) 及 (2.11), 有
再由 ${\rm{Sign}}\left[{\rm{Re}}\left(\dfrac{{\rm d}\lambda}{{\rm d}\tau}\right)\bigg|_{\tau=\tau_{0,j}}\right]={\rm{Sign}}\left[\left(\dfrac{{\rm d}\lambda}{{\rm d}\tau}\right)^{-1}\bigg|_{\tau=\tau_{0,j}}\right]>0$, 证毕.
引理 2.4 当 $\tau=\tau_{n,j}~(n\ge 1)$ 时, 若 $\cos(\omega_n\tau_{n,j})\ge 0$ 成立, 则有 ${\rm{Re}}\lambda'(\tau_{n,j})>0$.
证 当 $\tau=\tau_{n,j}~(n\ge 1)$ 时, 对应特征方程为 $n\ge 1$ 的情形. 将$\lambda=\lambda(\tau)$ 代入方程 (2.8), 在方程两边同时关于 $\tau$ 求导, 可得
结合方程 (2.8), (2.9) 及 (2.15), 有
(2.19) $\begin{matrix}\label{ReLambdaNJ} &~~~~{\rm{Re}}\left(\frac{{\rm d}\lambda}{{\rm d}\tau}\right)^{-1}\bigg|_{\tau=\tau_{n,j}}\notag\\ &={\rm{Re}}\left[\frac{2\lambda+(d_1+d_2)\frac{n^2}{l^2}+ce^{-\lambda\tau}}{c\lambda(\lambda+d_1\frac{n^2}{l^2}+\frac{m}{m+1})e^{-\lambda\tau}}-\frac{\tau}{\lambda}\right]\Bigg|_{\tau=\tau_{n,j}}\notag\\ &={\rm{Re}}\left[\frac{2\lambda+(d_1+d_2)\frac{n^2}{l^2}+ce^{-\lambda\tau}}{c\lambda(\lambda+d_1\frac{n^2}{l^2}+\frac{m}{m+1})e^{-\lambda\tau}}\right]\Bigg|_{\lambda={\rm i}\omega_n}\notag\\ &={\rm{Re}}\left[\frac{2\lambda^2+(d_1+d_2)\frac{n^2}{l^2}\lambda+c\lambda e^{-\lambda\tau}}{c\lambda^2(\lambda+d_1\frac{n^2}{l^2}+\frac{m}{m+1})e^{-\lambda\tau}}\right]\Bigg|_{\lambda={\rm i}\omega_n}\notag\\ &={\rm{Re}}\left[\frac{\lambda^2-d_1d_2\frac{n^4}{l^4}-c(d_1\frac{n^2}{l^2}+\frac{m}{m+1})e^{-\lambda\tau}}{c\lambda^2(\lambda+d_1\frac{n^2}{l^2}+\frac{m}{m+1})e^{-\lambda\tau}}\right]\Bigg|_{\lambda={\rm i}\omega_n}\notag\\ &=\frac{(\omega_n^2+d_1d_2\frac{n^4}{l^4})\left[(d_1\frac{n^2}{l^2}+\frac{m}{m+1})\cos(\omega_n\tau_{n,j})+\omega_n\sin(\omega_n\tau_{n,j})\right]+c(d_1\frac{n^2}{l^2}+\frac{m}{m+1})^2}{c\omega_n^2[(d_1\frac{n^2}{l^2}+\frac{m}{m+1})^2+\omega_n^2]}. \end{matrix}$
由方程 (2.15) 知, $\sin(\omega_n\tau_{n,j})>0$. 因此, 若$\cos(\omega_n\tau_{n,j})\ge 0$, 则 ${\rm{Re}}\left(\frac{{\rm d}\lambda}{{\rm d}\tau}\right)^{-1}\big|_{\tau=\tau_{n,j}}>0$. 又因
注 2.2 在引理 2.4 的证明过程中, 由方程 (2.19) 最右式知, 即使
横截条件 ${\rm{Re}}\lambda'(\tau_{n,j})>0$ 也成立.
注 2.3 若 ${\rm{Re}}\lambda'(\tau_{n,j})> 0$, 则特征方程 (2.8) 中满足 ${\rm{Re}}\lambda(\tau_{n,j})=0$ 和 ${\rm{Im}}\lambda(\tau_{n,j})=\omega_n$ 的特征根 $\lambda$ 的实部将随着 $\tau$ 的增大而增大, 也即当 $\tau\to\tau_{n,j}^+$ 时, ${\rm{Re}}\lambda(\tau)>0$; 相对应地, 若 ${\rm{Re}}\lambda'(\tau_{n,j})<0$, 特征方程 (2.8) 中满足 ${\rm{Re}}\lambda(\tau_{n,j})=0$ 和 ${\rm{Im}}\lambda(\tau_{n,j})=\omega_n$ 的特征根 $\lambda$ 的实部将随着 $\tau$ 的增加而减小, 即当 $\tau\to\tau_{n,j}^+$ 时, ${\rm{Re}}\lambda(\tau)<0$.
由方程 (2.12) 及 (2.16) 中所得的 $\tau_{n,j}$ 可知, 对固定的$n\in\{0,1,\cdot\cdot\cdot,N_0-1\}$, $\tau_{n,j}$ 是 $j$ 的增函数, 故有 $\tau_{n,0}=\min_{j\in\mathbb{N}_0}{\tau_{n,j}}$. 定义$\tau^*=\min\{\tau_{0,0},\cdot\cdot\cdot,\tau_{N_0-1,0}\}$, 可得下述结论.
定理 2.5 对模型 (1.1), 当 $\tau\in(0,\tau^*)$ 时, 模型中的正常值稳态解 $E_*$ 局部渐近稳定; 对所有的 $j\in\mathbb{N}_0$ 及 $n\le N_0-1$, 若当 $\tau=\tau_{n,j}$ 时对应横截条件不为零 (即 ${\rm{Re}}\lambda'(\tau_ {n,j})\neq0$), 则在 $\tau=\tau_{n,j}$ 处, 系统在正常值稳态解 $E_*$ 处产生 Hopf 分支.
对于模型 (1.1), 当选取时滞 $\tau$ 和参数 $m$ 为变化参数时, 可得如下结论.
定理 2.6 对模型 (1.1), 若存在 $m^*>0$ 及 $n_1, n_2$, 使得 $\tau_{n_1,j_1}=\tau_{n_2,j_2}$, 并且 ${\rm{Re}}\lambda'(\tau_ {n_1,j_1})\neq0$, ${\rm{Re}}\lambda'(\tau_ {n_2,j_2})\neq0$,~那么当 $m=m^*$ 且 $\tau=\tau_{n_1,j_1}$ 时, 系统在正稳态解 $E_*$ 处经历 Hopf-Hopf 分支.
注 2.4 事实上, 将参数 $m$ 看作自变量时, 由方程 (13) 及方程 (17) 知, 当 $j_1 \neq j_2$ 时, 函数曲线 $\tau=\tau_{n,j_1}(m)$ 与 $\tau=\tau_{n,j_2}(m)$ 恒不相交. 因此, 若系统存在 Hopf-Hopf 分支点, 则对于两条能相交的 Hopf 分支曲线 $\tau=\tau_{n_1,j_1}(m)$ 与 $\tau=\tau_{n_2,j_2}(m)$, 始终有 $n_1 \neq n_2$.
3 Hopf-Hopf 分支规范型
为研究系统 (1) 在 Hopf-Hopf 分支点附近的动力学行为, 我们需要计算相应的规范型. 下面将给出具时滞和非局部项的系统 (1.1) 中规范型的算法.
借助尺度变换, 令 $u(t)=u(\cdot,\tau t)-u_*,~v(t)= v(\cdot,\tau t)-v_*,$ 且 $\hat{u}(t)\to \hat{u}(\tau t)-u_*$, 系统 (1.1) 可写成
(3.1) $\left\{\begin{aligned}\dot{u}= & \tau\left[d_{1} \Delta u+\alpha_{12} v+\beta_{11} \hat{u}+\alpha_{1} u v+\tilde{\alpha}_{1} u \hat{u}\right], \\\dot{v}= & \tau\left[d_{2} \Delta v+c_{21} u(t-1)+c_{22} v(t-1)+\beta_{1} v v(t-1)+\beta_{2} v u(t-1)+\beta_{3} u^{2}(t-1)\right. \\& +\beta_{4} u(t-1) v(t-1)+\beta_{5} u^{3}(t-1)+\beta_{6} u^{2}(t-1) v(t-1)+\beta_{7} u^{2}(t-1) v \\& \left.+\beta_{8} v v(t-1) u(t-1)+O(4)\right].\end{aligned}\right.$
为研究系统 (1.1) 在 Hopf-Hopf 分支点 $(m^*,\tau^*)$ 附近的动力学行为, 引入参数 $\mu=(\mu_1,~\mu_2)$, 令
(3.2) $\dot{U}=\left(\tau^*+\mu_2\right)\left[D \Delta U+L_1(\mu_1) U_t(0)+L_2(\mu_1) \hat{U}_t(0)+L_3 U_t(-1) \right]+F(\mu_1,\mu_2,U_t,\hat{U}_t),$
通过计算可得 $L_1(\mu_1)$ 与 $L_2(\mu_1)$ 的泰勒展开式为
为简便起见, 仍将矩阵 $L_1(0), L_2(0)$ 分别记为
因此, 在 Hopf-Hopf 分支点处, 方程 (3.2) 的线性化方程为
(3.3) $\dot{U}=\tau^*\left[D \Delta U+L_1(0)U_t(0)+L_2(0)\hat{U}_t(0)+L_3U_t(-1)\right],$
为方便分支规范型的计算, 将方程 (3.2) 重写为
(3.4) $\dot{U}=\tau^*\left[D \Delta U+L_1(0)U_t(0)+L_2(0)\hat{U}_t(0)+L_3U_t(-1)\right]+\tilde{F}(\mu_1,\mu_2,U_t,\hat{U}_t),$
(3.5) $\begin{aligned}\tilde{F}(\mu_1,\mu_2,U_t,\hat{U}_t)=&\mu_2[D \Delta U+L_1(0)U_t(0)+L_2(0)\hat{U}_t(0)+L_3U_t(-1)]\\&+\tau^*[(L_1(\mu_1)-L_1(0))U_t(0)+(L_2(\mu_1)-L_2(0)){\hat U}_t(0)]+F.\end{aligned}$
对于线性化方程 (3.3), 其特征方程有纯虚特征值 $\Lambda=\left\{ \pm \mathrm{i} \omega_1 \tau^*, \pm \mathrm{i} \omega_2 \tau^*\right\}$, 且其它所有特征值有严格负实部. 不妨设相应特征方程在$n=0$ 及 $n=1$ 时存在两对纯虚特征根, 记为 $\pm \mathrm{i} \omega_1 \tau^*$ 及 $\pm \mathrm{i} \omega_2 \tau^*$, 选取$\phi_1(\theta)=\left(1, p_1\right)^{\mathrm{T}} \mathrm{e}^{\mathrm{i} \omega_1 \tau^* \theta}, \phi_2(\theta)=\left(1, p_2\right)^{\mathrm{T}} \mathrm{e}^{\mathrm{i} \omega_2 \tau^* \theta},(\theta \in[-1,0])$分别作为特征值 $ \mathrm{i} \omega_1 \tau^*, \mathrm{i} \omega_2 \tau^*$ 的列特征向量. 此外, 选取$\psi_1(s)=M_1\left(1, q_1\right) \mathrm{e}^{-\mathrm{i} \omega_1 \tau^* s}, \psi_2(s)=M_2\left(1, q_2\right) \mathrm{e}^{-\mathrm{i} \omega_2 \tau^* s},(s \in [0,1])$分别作为特征值 $ \mathrm{i} \omega_1 \tau^*, \mathrm{i} \omega_2 \tau^*$ 的行特征向量. 通过直接计算, 有
记 $\Phi_1(\theta)=\left(\phi_1(\theta), \overline{\phi_1}(\theta)\right), \Phi_2(\theta)=\left(\phi_2(\theta), \overline{\phi_2}(\theta)\right)$, $\Psi_1(s)=\left(\psi_1(s), \overline{\psi_1}(s)\right)^T, \Psi_2(s)=\left(\psi_2(s), \overline{\psi_2}(s)\right)^T$, $\Phi(\theta)=\left(\Phi_1(\theta), \Phi_2(\theta)\right), \Psi(s)=\left(\Psi_1(s), \Psi_2(s)\right)^T.$
为简化 Hopf-Hopf 分支规范型的计算, 我们将通过坐标变换和复数运算, 把实值系统 (1.1) 嵌入到复化空间 $X_{\mathbb{C}}$. 将复化空间 $X_{\mathbb{C}}$ 分解为 $X_{\mathbb{C}}=P\oplus {\text{Ker}} \pi,$ 其中 $\pi : X_{\mathbb{C}}\to P$ 是一个投影, 定义为 $\pi(U)=\sum_{m=1}^2 \Phi_m\left(\Psi_m,\left\langle U, \tilde{\beta}_{n_m}\right\rangle\right) \xi_{n_m},$ 其中 $\tilde{\beta}_{n_m}=(\beta_{n_m}^1,\beta_{n_m}^2)$. 则 $U\in X_{\mathbb{C}}$ 可以分解为
其中 $w(\theta)\in X_{\mathbb{C}} \cap {\text{Ker}} \pi$. 记 $z(t)=(z_1(t),z_2(t),z_3(t),z_4(t))^T\in \mathbb{C}^4$, 令
将方程 (3.2) 中的 $(U,\hat{U},\mu)$ 替换为 $(z,w,\hat{w},\mu)$, 可将方程 (3.2) 重新表示为
(3.6) $\left\{\begin{array}{l}\dot{z}=B z+\bar{\Psi}\binom{\left\langle\tilde{\beta}_{n_{1}}, \widetilde{F}(z, w, \hat{w}, \mu)\right\rangle}{\left\langle\tilde{\beta}_{n_{2}}, \widetilde{F}(z, w, \hat{w}, \mu)\right\rangle}, \\\frac{\mathrm{d}}{\mathrm{~d} t} w=\mathcal{L}_{1} w+(I-\pi) \widetilde{F}(z, w, \hat{w}, \mu),\end{array}\right.$
其中 $B={\rm diag}(B_1,B_2), B_1={\rm diag}(\mathrm{i}\omega_1,-\mathrm{i}\omega_1), B_2={\rm diag}(\mathrm{i}\omega_2,-\mathrm{i}\omega_2).$
借助泰勒展开式, 将 $\tilde{F}(\mu,U_t,\hat{U}_t)$ 表示为
其中 $\tilde{F}_j$ 是 $\tilde{F}$ 的 $j$ 阶 Fr${\acute{\rm e}}$chet 导数. 如此, 方程 (3.6) 可表示为
(3.7) $\left\{\begin{array}{l}\dot{z}=B z+\sum_{j \geqslant 2} \frac{1}{j!} f_{j}^{1}(z, w, \hat{w}, \mu) \\\frac{\mathrm{d}}{\mathrm{~d} t} w=\mathcal{L}_{1} w+\sum_{j \geqslant 2} \frac{1}{j!} f_{j}^{2}(z, w, \hat{w}, \mu)\end{array}\right.$
上述方程中的 $\hat{w}=\frac{1}{l \pi} \int_0^{l \pi} w {\rm d} x \in \operatorname{Ker} \pi$, $f_j^1(z, w, \hat{w}, \mu)$ 和 $f_j^2(z, w, \hat{w}, \mu)$ 分别为
(3.8) $\begin{array}{l}f_{j}^{1}(z, w, \hat{w}, \mu)=\bar{\Psi}\binom{\left\langle\tilde{\beta}_{n_{1}}, \widetilde{F}_{j}(z, w, \hat{w}, \mu)\right\rangle}{\left\langle\tilde{\beta}_{n_{2}}, \widetilde{F}_{j}(z, w, \hat{w}, \mu)\right\rangle}, \\f_{j}^{2}(z, w, \hat{w}, \mu)=(I-\pi) \widetilde{F}_{j}(z, w, \hat{w}, \mu).\end{array}$
借助文献 [22 ] 中的算法, 通过相应的变量代换, 就可以得到方程 (3.7) 的规范型. 如文献 [22 ] 中的定义, 对于一个赋范空间 $Y$, $V_j^ {4+2}(Y)$ 表示系数在 $Y$ 中的 $j$ 阶齐次多项式生成的空间, 其中 $z\in \mathbb{C}, \mu=(\mu_1,\mu_2)$ 且有
范数为 $\left|\sum_{|(p, l)|=j} c_{(p, l)} z^p \mu^{l}\left|=\sum_{|(p, l)|=j}\right| c_{(p, l)}\right|_{Y}.$ 定义算子
(3.9) $M_j=\left(M_j^1, M_j^2\right), j \geq 2$ 为$\begin{aligned}& M_j^1: V_j^{4+2}\left(\mathbb{C}^4\right) \rightarrow V_j^{4+2}\left(\mathbb{C}^4\right), \\& \left(M_j^1 p\right)(z, \mu)=D_z p(z, \mu) B z-B p(z, \mu), \\& M_j^2: V_j^{4+2}(\operatorname{Ker} \pi) \rightarrow V_j^{4+2}(\operatorname{Ker} \pi), \\& \left(M_j^2 h\right)(z, \mu)=D_z h(z, \mu) B z-\mathcal{L}_1 h(z, \mu).\end{aligned}$
其中 $U_j=(U_j^1,U_j^2)\in V_j^{4+2}\left(\mathbb{C}^4\right)\times V_j^{4+2}(\operatorname{Ker} \pi)$, 由此可得方程 (3.7) 的规范型. 这个可逆变换将方程 (3.7) 转换成如下方程
(3.10) $\left\{\begin{array}{l}\dot{z}=B z+\sum_{j \geqslant 2} \frac{1}{j!} g_{j}^{1}(z, w, \hat{w}, \mu) \\\frac{\mathrm{d}}{\mathrm{~d} t} w=\mathcal{L}_{1} w+\sum_{j \geqslant 2} \frac{1}{j!} g_{j}^{2}(z, w, \hat{w}, \mu)\end{array}\right.$
其中 $g_j=(g_j^1,g_j^2), j\geq 2$ 及 $U_j$ 分别为
上式中的 $\overline{f}_j=(\overline{f}_j^1,\overline{f}_j^2)$ 表示在 $(z,w)$ 中的 $j$ 阶项, 可由计算后的规范型中阶数为 $j-1$ 的项计算得到. 最终计算得出的三次截断规范型为
(3.11) $\dot{z}=Bz+\frac{1}{2!}g_2^1(z,0,0,\mu)+\frac{1}{3!}g_3^1(z,0,0,0)+\cdot\cdot\cdot.$
$g_2^1(z,0,0,\mu)=\text{Proj}_{\text{Ker}(M_2^1)}f_2^1(z,0,0,\mu)$, 通过计算可得
(3.12) $\frac{1}{2!} g_{2}^{1}(z, 0,0, \mu)=\frac{1}{2!} \operatorname{Proj}_{\operatorname{Ker}\left(M_{2}^{1}\right)} f_{2}^{1}(z, 0,0, \mu)=\left(\begin{array}{c}E_{11} \mu_{1} z_{1}+E_{21} \mu_{2} z_{1} \\\overline{E_{11}} \mu_{1} z_{2}+\overline{E_{21}} \mu_{2} z_{2} \\E_{13} \mu_{1} z_{3}+E_{23} \mu_{2} z_{3} \\\overline{E_{13}} \mu_{1} z_{4}+\overline{E_{23}} \mu_{2} z_{4}\end{array}\right),$
其中 $E_{11}, E_{21}, E_{13}, E_{23}$ 分别为
在规范型 (3.11) 中, $g_3^1(z,0,0,0)=\text{Proj}_{\text{Ker}(M_3^1)}\overline{f}_3^1(z,0,0,0)$, 且 $\overline{f}_3^1(z,0,0,0)$ 的计算公式为
(3.13) $\begin{aligned}\overline{f}_3^1(z,0,0,0)=& f_3^1(z,0,0,0)+\frac{3}{2}\big[D_zf_2^1(z,0,0,0)U_2^1(z,0)+D_wf_2^1(z,0,0,0)U_2^2(z,0)\\&+D_{\hat w}f_2^1(z,0,0,0){\hat U}_2^2(z,0)-D_zU_2^1(z,0)g_2^1(z,0,0,0)\big].\end{aligned}$
由公式 (3.12) 知, $g_2^1(z,0,0,0)=0$. 要得到规范型中的 $g_3^1(z,0,0,0)$, 还需计算如下四项
$\begin{aligned} &(\text{a}) ~~\text{Proj}_{\text{Ker}(M_3^1)}f_3^1(z,0,0,0),\\ &(\text{b}) ~~\text{Proj}_{\text{Ker}(M_3^1)}\big(D_zf_2^1(z,0,0,0)U_2^1(z,0)\big),\\ &(\text{c}) ~~\text{Proj}_{\text{Ker}(M_3^1)}\big(D_wf_2^1(z,0,0,0)U_2^2(z,0)\big),\\ &(\text{d}) ~~\text{Proj}_{\text{Ker}(M_3^1)}\big(D_{\hat{w}}f_2^1(z,0,0,0){\hat{U}}_2^2(z,0)\big).\\ \end{aligned}$
具体计算过程可参阅附录. 通过上述计算, 得到系统 (1.1) 在Hopf-Hopf 分支点附近的规范型如下
(3.14) $\begin{cases}\dot{z}_1=\mathrm{i} \omega_1 \tau^* z_1+E_{11} \mu_1 z_1+E_{21} \mu_2 z_1+E_{2100} z_1^2 z_2+E_{1011} z_1 z_3 z_4, \\\dot{z}_2=-\mathrm{i} \omega_1 \tau^* z_2+\overline{E_{11}} \mu_1 z_2+\overline{E_{21}} \mu_2 z_2+\overline{E_{2100}} z_1 z_2^2+\overline{E_{1011}} z_2 z_3 z_4, \\\dot{z}_3=\mathrm{i} \omega_2 \tau^* z_3+E_{13} \mu_1 z_3+E_{23} \mu_2 z_3+E_{0021} z_3^2 z_4+E_{1110} z_1 z_2 z_3, \\\dot{z}_4=-\mathrm{i} \omega_2 \tau^* z_4+\overline{E_{13}} \mu_1 z_4+\overline{E_{23}} \mu_2 z_4+\overline{E_{0021}} z_3 z_4^2+\overline{E_{1110}} z_1 z_2 z_4.\end{cases}$
其中 $\rho_1, \rho_2>0$. 再记 $\epsilon_1=\operatorname{sign}\left(\operatorname{Re} E_{2100}\right), \epsilon_2=\operatorname{sign}\left(\operatorname{Re} E_{0021}\right)$, 令 $\widehat{\rho}_1=\rho_1 \sqrt{\left|E_{2100}\right|}, \widehat{\rho}_2=\rho_2 \sqrt{\left|E_{0021}\right|}, \widehat{t}=t \epsilon_1$, 去掉符号上的弯角标, 可得 (3.14) 式的简化方程为
(3.15) $\begin{cases}\dot{\rho}_1=\rho_1\left(v_1+\rho_1^2+b_0 \rho_2^2\right), \\\dot{\rho}_2=\rho_2\left(v_2+c_0 \rho_1^2+d_0 \rho_2^2\right),\end{cases}$
文献 [23 ,第 7.5 章] 中证明了系统 (3.15) 有 12 种对应的动力学情形, 在下一节的数值模拟中, 我们以其中的情形 Ib 为例画出了系统在 Hopf-Hopf 分支点附近的分支图和相图.
4 数值模拟
在本节中, 我们运用数值模拟来验证得到的理论结果, 展示系统在 Hopf 分支及 Hopf-Hopf 分支点附近丰富的动力学现象.
4.1 Hopf 分支的数值模拟
(4.1) $d_1=1,~ d_2=0.5, ~m=0.8,~ l=2,~ c=0.2.$
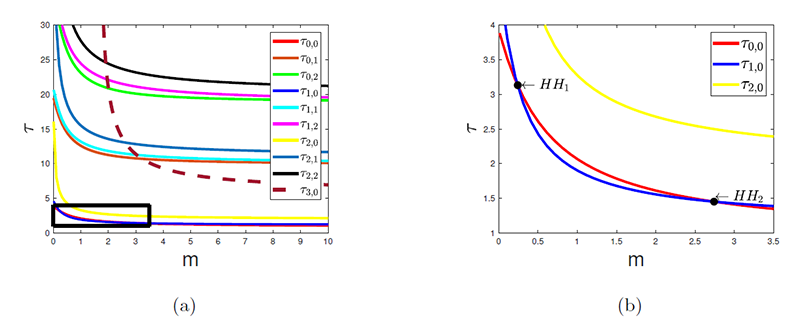
取 $\tau$ 为分支参数. 由方程 (11) 中函数 $F_n(\omega)$ 的表达式可得 $F_n(\omega)$ 的函数图像, 如图 1 所示. 显然, 当 $n\ge 2$ 时, $F_n(\omega)>0$ 在 $\omega\ge0$ 时恒成立. 当 $n\le 1$ 时, 存在唯一的 $\omega_n>0$ 使得 $F_n(\omega_n)=0$. 其中, $\omega_0=0.3265$, $\omega_1=0.3429$. 结合方程 (13), 得
图1
图1
(a) $F_n(\omega)$ 的函数图像, $n=0,1,2,3$. (b) 放大图 (a) 中的黑框部分.
为得到 $\tau_{1,j}$ 的表达式, 将 $\omega_1=0.3429$, $n=1$ 及 (4.1) 中的参数值代入方程 (2.15), 得 $\cos(\omega_1\tau)=0.1332>0$, 再由方程 (18) 算得 $\tau_{1,j}$ 为
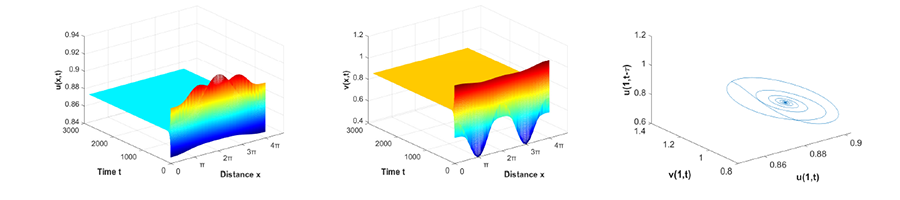
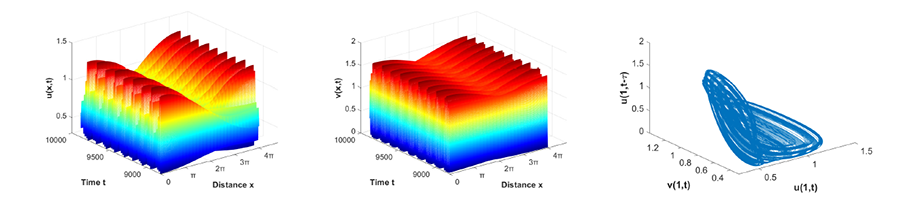
又 $\tau^*=\min\{\tau_{0,0},\tau_{1,0}\}$, 故 $\tau^*=4.1503.$ 由定理 2.5 知, 当 $\tau=3<\tau^*$ 时, 正常值稳态解 $E_*=(0.5556,0.5556)$ 是局部渐近稳定的, 如图 2 所示. 当 $\tau=4.17\in(\tau^*,\tau_{1,0})$ 时, 正常值稳态解 $E_*=(0.5556,0.5556)$ 失稳, 系统 (1.1) 产生稳定的周期解, 如图 3 所示.
图2
图2
当 $\tau=3<\tau^*$ 时, 正常值稳态解 $E_*$ 是局部渐近稳定的. 初始值为 $u_0(x,t)=0.5556-0.2\cos x, v_0(x,t)=0.5556+0.2\cos x$, 其中 $(x,t)\in [0,l\pi]\times[-\tau,0]$.
图3
图3
当 $\tau=4.17>\tau^*$ 时, 系统(1.1) 产生稳定的周期解. 初始值为 $u_0(x,t)=0.5556-0.4\cos x, v_0(x,t)=0.5556+0.4\cos x$, 其中 $(x,t)\in [0,l\pi]\times[-\tau,0]$.
4.2 Hopf-Hopf 分支的数值模拟
本小节, 将通过模拟来展示系统 (1.1) 在 Hopf-Hopf 分支值附近的动力学性质,如周期解和拟周期振荡等. 选取 $\tau$ 和 $m$ 为分支参数,固定参数
通过计算可得, 当 $n\le 2$ 时, $F_n(0)<0$ 恒成立; 当 $n=3$ 时, $F_n(0)<0$ 对 $m>1.6597$ 成立; 当 $n\ge 4 $ 时, $F_n(0)>0$ 恒成立. 由前面的理论分析,可得系统的分支图如图 4 所示. 由图 4(a) 可知, 对于稳定性切换曲线 $\tau=\tau_{0,0}(m)$ 和 $\tau=\tau_{1,0}(m)$, 有两个交点 $HH_1(0.2417,3.1328)$ 和 $HH_2(2.7428,1.4506)$. 由上一节推导规范型的计算程序, 可计算得出表 1 中的参数值.
图4
图4
(a) 系统在 $m-\tau$ 平面上的部分分支集, 彩色曲线代表 Hopf 分支曲线. (b) 放大左图中的黑框部分, 得到系统在 Hopf-Hopf 分支点 ``$HH_1$" 和 ``$HH_2$" 附近的分支集.
借助分支规范型的计算可得表 1 , 即在 $HH_1$ 点附近情形 Ib 出现, 且有
由于系统 (1.1) 在 Hopf-Hopf 分支点 ($m^*,\tau^*$) 附近的动力学现象与方程 (3.15) 在 $(\mu_1,\mu_2)=(0,0)$ 附近的动力学现象拓扑等价. 因此, 在 $HH_1$ 点的附近有六个区域, 每个区域对应一种相图, 具体可见图 5. 分隔这六个区域的曲线为 $l_1-l_4$, 其中
图5
当选取 $(m,\tau)$ 为区域 $D_1$ 中的点 $P_1(0.1417, 2.8828)$ 时, 正常值稳态解是一个汇, 这在图 6 中得到了验证. 当选取区域 $D_2$ 中的点 $P_2(0.1417, 3.1728)$ 时, 系统有一个稳定的分支周期解, 如图 7 所示. 当选取 $P_3(0.4917, 2.8828)\in D_5$ 时, 系统 (1.1) 也有一个稳定的分支周期解, 如图 8 所示. 当选取 $P_4(0.4917,3.1728)\in D_4$ 时, 系统有一个稳定的空间非齐次周期解. 当 $(m,\tau)$ 选在区域 $D_3$ 或 $D_6$ 中时, 系统 (1.1) 中有一组稳定的空间齐次周期解, 对应情形也可模拟出, 此处不再模拟.
图6
图6
当 $(m,\tau)=(0.1417, 2.8828)\in D_1$ 时, $E_*$ 局部渐近稳定. 初始值为 $u_0(x,t)=0.8759+0.5\cos x, v_0(x,t)=0.8759-0.5\cos x$, 其中 $(x,t)\in [0,l\pi]\times[-\tau,0]$.
图7
图7
当 $(m,\tau)=(0.1417, 3.1728)\in D_2$ 时, 系统 (1.1) 有一组稳定的空间齐次分支周期解. 初始值为 $u_0(x,t)=0.8759+0.5\cos x, v_0(x,t)=0.8759-0.5\cos x$, 其中 $(x,t)\in [0,l\pi]\times[-\tau,0]$.
图8
图8
当 $(m,\tau)=(0.4917, 2.8828)\in D_5$ 时, 系统 (1.1) 有一组稳定的空间齐次分支周期解. 初始值为 $u_0(x,t)=0.6704+0.5\cos x, v_0(x,t)=0.6704-0.5\cos x$, 其中 $(x,t)\in [0,l\pi]\times[-\tau,0]$.
图9
图9
当 $(m,\tau)=(0.4917,3.1728)\in D_4$ 时, 系统 (1.1) 有一组稳定的空间非齐次周期解. 初始值为 $u_0(x,t)=0.6704+0.5\cos x, v_0(x,t)=0.6704-0.5\cos x$, 其中 $(x,t)\in [0,l\pi]\times[-\tau,0]$.
对于 Hopf-Hopf 分支点 $HH_2$, 由表 1 知情形 Ia 出现. 在 $HH_2$ 点的附近也有对应不同相图的六个区域, 这六个区域由曲线 $k_1-k_4$ 分隔开, 其中
在 $HH_2$ 点附近每个区域的相图与动力学性质也可绘制出来, 此处不再绘制与模拟.
5 结论
本文研究了一类具非局部扩散和时滞的 Leslie-Gower 种群模型的动力学性质. 该模型既考虑了食饵种群、捕食者群体的随机扩散, 又考虑了食饵种群个体的移动倾向由整个空间域中剩余所有个体运动倾向的某种 “综合" 作用. 此外, 食饵种群密度对于捕食者种群密度影响的滞后效应也被考虑到模型中.
本文分析了模型对应的线性方程中特征方程根的分布情况, 研究了了各稳态解的稳定性. 以时滞为变化参数, 探究了模型中 Hopf 分支的存在性; 以捕获率和时滞为双变化参数, 分析了模型中 Hopf-Hopf 分支的存在性. 研究表明, 在一定参数条件下, 系统既可以产生 Hopf 分支, 也会产生 Hopf-Hopf 分支. 借助中心流形理论, 推导了具非局部项和时滞模型的 Hopf-Hopf 分支点附近的分支规范型, 通过该分支规范型可得到模型在相应的 Hopf-Hopf 分支点附近的分支集及对应的相图. 借助一组参数, 理论上证明了模型中的空间齐次周期解和空间非齐次周期解的存在性. 研究发现双参数的协同作用可激发系统产生稳定的空间非齐次周期解, 表明 Hopf-Hopf 分支点附近的动力学行为对 Leslie-Gower 系统的时空斑图形成及演化速度起着至关重要的作用.
附录
$(\text{a}) ~~\text{Proj}_{\text{Ker}(M_3^1)}f_3^1(z,0,0,0)$ 的计算
$\widetilde{F}(U,\hat{U},\mu)$ 在 $(\Psi z^x, \Psi {\hat z}^x,0)$ 处的三阶 Fr$\acute{\rm e}$chet 导数为
其中 $l=(l_{1},l_{2},l_{3},l_{4})\in\mathbb{N}_{0}^{4}$, $| l| = \sum _{j= 1}^{4}I_{j}$,~ $F_{l_{1}l_{2}l_{3}l_{4}}$ 是 $z_{1}^{l_{1}}z_{2}^{l_{2}}z_{3}^{l_{3}}z_{4}^{l_{4}}$ 的系数向量. 因此, 有
$(\text{b}) ~~\text{Proj}_{\text{Ker}(M_3^1)}\big(D_zf_2^1(z,0,0,0)U_2^1(z,0)\big)$ 的计算
其中 $S_{2}(w)$ 和 $S_{2}(\hat{w})$ 是 $w$ and $\tilde{w}$ 的线性项. 故有
上式中系数向量 $F_{l_{1}l_{2}l_{3}l_{4}}(l_{1}+l_{2}+l_{3}+l_{4}=2)$ 的形式为:
上式中 $B_{2100},B_{1011},B_{0021}$ 及 $B_{1110}$ 的表达式为
$(\text{c}) ~~\text{Proj}_{\text{Ker}(M_3^1)}\big(D_wf_2^1(z,0,0,0)U_2^2(z,0)\big)$ 和 $\text{Proj}_{\text{Ker}(M_3^1)}\big(D_{\hat{w}}f_2^1(z,0,0,0){\hat{U}}_2^2(z,0)\big)$ 的计算的计算
由 $f_{3}^{1}(z,0,0,0)$ 的表达式及 $\bar{F}_{2}(z,w,\hat{w},0)=F_{2}(z,w,\hat{w},0)$, 可得
$\begin{aligned} F_{2}(z,w,\hat{w},0) &=\sum_{|l|=2}F_{l_{1}l_{2}l_{3}l_{4}}\xi_{m_{1}}^{l_{1}+l_{2}}(x)\xi_{m_{2}}^{l_{3}+l_{4}}z_{1}^{l_{1}}z_{2}^{l_{2}}z_{3}^{l_{3}}z_{4}^{l_{4}}+S_{2}(\hat{w})+S_{2}(w)+o(\mid w\mid^{2},\mid w\hat{w}\mid,\hat{w}^{2}) \\ &=S_{wz}(w)z^{x}+S_{\hat{w}z}(\hat{w})z^{x}+o(\mid w\mid^{2},\mid w\hat{w}\mid,\hat{w}^{2},z^{2}), \end{aligned}$
其中 $z^{x}=(\xi_0z_{1},\xi_0z_{2},\xi_1z_{3},\xi_1z_{4})^{T}$, $S_{wz_i}$ and $S_{\hat{w}z_i}$ 是从 $\text{Ker}\pi$ 映到 $X_{\mathbb{C}}$ 的如下线性算子:
$F_{w_1z_i}$, $F_{w_2z_i}$, $F_{\hat{w}_1z_i}$ 和 $F_{\hat{w}_2z_i}$ 均为系数向量. 经过计算, 可得
其中 $C_{2100},C_{1011},C_{0021},C_{1110},\hat{C}_{2100},\hat{C}_{1011},\hat{C}_{0021}$\hat{C}_{0021}$\hat{C}_{0021}$ 及 $\hat{C}_{1110}$ 的计算公式为
类似可得 $S_{yz_{3}}(w_{1,1001}),S_{yz_{4}}(w_{1,1010}),\cdots,S_{\hat{y}z_{4}}(w_{0,0020})$ 的计算公式. 通过计算得 $F_{y(0)z_i}$ 及 $F_{y(-1)z_i}$ 分别为
系数矩阵 $F_{\hat{y}(0)z_i}$ 为
此外, $w_{0,2000}(0)$ 和 $w_{0,2000}(\theta)$ 为
$w_{0,1100}(\theta)$ 和 $w_{0,0011}(\theta)$ 的计算公式为
$w_{1,1001}(\theta)$ 和 $w_{1,1010}(\theta)$ 的计算公式为
$\begin{aligned} w_{1,1001}(\theta) &=\frac{1}{\sqrt{l\pi}\:\tau^{*}}\biggl\{-\frac{\phi_{2}(\theta)}{\mathrm{i}\omega_{1}}\bar{\psi}_{2}(0)+\frac{\phi_{2}(\theta)\psi_{2}(0)}{-\mathrm{i}\omega_{1}+2\mathrm{i}\omega_{2}}-e^{(\mathrm{i}\omega_{1}-\mathrm{i}\omega_{2})\tau^{*}\theta}\\ &~~~\times\big[-(\mathrm{i}\omega_{1}-\mathrm{i}\omega_{2})I_{d}-D_{0}/l^{2}+L_1(0)+L_3e^{-(\mathrm{i}\omega_{1}-\mathrm{i}\omega_{2})\tau^{*}}\big]^{-1}\Big\}F_{1001}, \\ w_{1,1010}(\theta) &=\frac{1}{\sqrt{l\pi}\:\tau^{*}}\biggl\{\frac{\phi_{2}(\theta)}{-\mathrm{i}\omega_{1}}\psi_{2}(0)-\frac{\bar{\phi}_{2}(\theta)\bar{\psi}_{2}(0)}{\mathrm{i}\omega_{1}+2\mathrm{i}\omega_{2}}-e^{(\mathrm{i}\omega_{1}+\mathrm{i}\omega_{2})\tau^{*}\theta}\\ &~~~\times\big[-(\mathrm{i}\omega_{1}+\mathrm{i}\omega_{2})I_{d}-D_{0}/l^{2}+L_1(0)+L_3e^{-(\mathrm{i}\omega_{1}+\mathrm{i}\omega_{2})\tau^{*}}\big]^{-1}\Big\}F_{1010}. \end{aligned}$
$w_{0.0020}(\theta)$ 和 $w_{1,0110}(\theta)$ 的计算公式为
其中 $I_{d}$ 为单位矩阵. $w_{2,0011}(\theta)$W_{2,0020}(\theta)$ 及 $w_{2,1100}(\theta)$ 的计算公式为
最后, 可得 $g_{3}^{1}(z,0,0,0)$ 的计算公式为
上式中的系数 $E_{2100},E_{1011},E_{0021}$ 和 $E_{1110}$ 由四部分组成, 具体为
参考文献
View Option
[1]
Xiao Y Chen L Modeling and analysis of a predator-prey model with disease in the prey
Mathematical Biosciences , 2001 , 171 1 ): 59 -82
PMID:11325384
[本文引用: 1]
A system of retarded functional differential equations is proposed as a predator-prey model with disease in the prey. Mathematical analyses of the model equations with regard to invariance of non-negativity, boundedness of solutions, nature of equilibria, permanence and global stability are analyzed. If the coefficient in conversing prey into predator k=k(0) is constant (independent of delay tau;, gestation period), we show that positive equilibrium is locally asymptotically stable when time delay tau; is suitable small, while a loss of stability by a Hopf bifurcation can occur as the delay increases. If k=k(0)e(-dtau;) (d is the death rate of predator), numerical simulation suggests that time delay has both destabilizing and stabilizing effects, that is, positive equilibrium, if it exists, will become stable again for large time delay. A concluding discussion is then presented.
[2]
Wang X Wang H Wu J Traveling waves of diffusive predator-prey systems: disease outbreak propagation
Discrete and Continuous Dynamical Systems , 2012 , 32 9 ): 3303 -3324
DOI:10.3934/dcds.2012.32.3303
URL
[3]
Yan X Li W T Hopf bifurcation and global periodic solutions in a delayed predator-prey system
Applied Mathematics and Computation , 2006 , 177 1 ): 427 -445
DOI:10.1016/j.amc.2005.11.020
URL
[4]
Lou Y Nie H Global dynamics of a generalist predator-prey model in open advective environments
Journal of Mathematical Biology , 2022 , 84 6 ): Art 46
[本文引用: 1]
[5]
Allee W C Animal Aggregations:A Study in General Sociology . Chicago : University of Chicago Press , 1931
[本文引用: 1]
[6]
Leslie P H Gower J C The properties of a stochastic model for the predator-prey type of interaction between two species
Biometrika , 1960 , 47 3/4 ): 219 -234
DOI:10.1093/biomet/47.3-4.219
URL
[本文引用: 1]
[7]
Gong Y Huang J Bogdanov-Takens bifurcation in a Leslie-Gower predator-prey model with prey harvesting
Acta Mathematicae Applicatae Sinica , 2014 , 30 1 ): 239 -244
DOI:10.1007/s10255-014-0279-x
URL
[本文引用: 1]
[8]
Chen S Shi J Wei J Global stability and Hopf bifurcation in a delayed diffusive Leslie-Gower predator-prey system
International Journal of Bifurcation and Chaos , 2012 , 22 3 ): Art 1250061
[9]
Liu Y Wei J Spatiotemporal dynamics of a modified Leslie-Gower model with weak Allee effect
International Journal of Bifurcation and Chaos , 2020 , 30 12 ): Art 2050169
[本文引用: 1]
[10]
Martin A Ruan S Predator-prey models with delay and prey harvesting
Journal of Mathematical Biology , 2001 , 43 3 ): 247 -267
PMID:11681528
It is known that predator-prey systems with constant rate harvesting exhibit very rich dynamics. On the other hand, incorporating time delays into predator-prey models could induce instability and bifurcation. In this paper we are interested in studying the combined effects of the harvesting rate and the time delay on the dynamics of the generalized Gause-type predator-prey models and the Wangersky-Cunningham model. It is shown that in these models the time delay can cause a stable equilibrium to become unstable and even a switching of stabilities, while the harvesting rate has a stabilizing effect on the equilibrium if it is under the critical harvesting level. In particular, one of these models loses stability when the delay varies and then regains its stability when the harvesting rate is increased. Computer simulations are carried to explain the mathematical conclusions.
[11]
Liu J Zhang T Traveling wave solutions of a delayed prey-predator system with diffusion
International Journal of Biomathematics , 2017 , 10 1 ): Art 1750001
[本文引用: 1]
[12]
肖江龙 , 宋永利 , 夏永辉 . 一个扩散模型中恐惧效应与集群行为协同诱导的时空动力学研究
数学物理学报 , 2024 , 44A 6 ): 1577 -1594
[本文引用: 2]
Xiao J Song Y Xia Y Spatiotemporal dynamics induced by the interaction between fear and schooling behavior in a diffusive model
Acta Math Sci , 2024 , 44A 6 ): 1577 -1594
[本文引用: 2]
[13]
Lewis M A Petrovskii S V Potts J R The Mathematics Behind Biological Invasions . Switzerland : Springer International Publishing , 2016
[14]
Wang J Wu S Shi J Pattern formation in diffusive predator-prey systems with predator-taxis and prey-taxis
Discrete Continuous Dynamical Systems-Series B , 2021 , 26 3 ): 1273 -1289
DOI:10.3934/dcdsb.2020162
URL
[本文引用: 1]
[15]
吴鹏 , 张帅 , 方诚 . 一类具有非局部扩散和空间异质性年龄-空间结构松材线虫病模型动力学分析
数学物理学报 , 2025 , 45A 3 ): 946 -959
[本文引用: 1]
Wu P Zhang S Fang C Dynamics of an age-space structure pine wilt disease model with nonlocal diffusion and spatial heterogeneity
Acta Math Sci , 2025 , 45A 3 ): 946 -959
[本文引用: 1]
[16]
Yang J Gong M Sun G Q Asymptotical profiles of an age-structured foot-and-mouth disease with nonlocal diffusion on a spatially heterogeneity environment
Journal of Differential Equations , 2023 , 377 71 -112
DOI:10.1016/j.jde.2023.09.001
URL
[17]
Chen S Yu J Stability and bifurcation on predator-prey systems with nonlocal prey competition
Discrete and Continuous Dynamical Systems , 2018 , 38 1 ): 43 -62
DOI:10.3934/dcds.2018002
URL
[本文引用: 1]
[18]
Braza P A The bifurcation structure of the Holling-Tanner model for predator-prey interactions using two-timing
SIAM Journal on Applied Mathematics , 2003 , 63 3 ): 889 -904
DOI:10.1137/S0036139901393494
URL
[本文引用: 1]
[19]
Xiang C Huang J Wang H Bifurcations in Holling-Tanner model with generalist predator and prey refuge
Journal of Differential Equations , 2023 , 343 495 -529
DOI:10.1016/j.jde.2022.10.018
URL
[本文引用: 1]
[20]
Ruan S Wei J On the zeros of transcendental functions with applications to stability of delay differential equations with two delays
Dynamics of Continuous Discrete and Impulsive Systems-Series A-Mathematical Analysis , 2003 , 10 6 ), 863 -874
[本文引用: 1]
[21]
魏俊杰 , 王洪滨 , 蒋卫华 . 时滞微分方程的分支理论及应用 . 北京 : 科学出版社 , 2012
[本文引用: 1]
Wei J Wang H Jiang W The Bifurcation Theory and Applications of Delay Differential Equations . Beijing : Science Press , 2012
[本文引用: 1]
[22]
Du Y Niu B Guo Y Wei J Double Hopf bifurcation in delayed reaction-diffusion systems
Journal of Dynamics and Differential Equations , 2020 , 32 1 ):313 -358
DOI:10.1007/s10884-018-9725-4
[本文引用: 2]
[23]
Guckenheimer J Holmes P Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields . New York : Springer-Verlag , 1983
[本文引用: 1]
Modeling and analysis of a predator-prey model with disease in the prey
1
2001
... 自然界中的种群通过复杂的种间相互作用形成动态关联. 在生态系统中, 一种生物以另一种生物为食的种间关系称为捕食. 捕食是生物获取能量和营养物质的主要方式之一,其能起到优胜劣汰、协同进化, 进而达到维护生态系统稳定的作用. 近年来,很多学者对刻画两种群动态演化的捕食-食饵模型的动力学性质进行了研究[1 4 ] . ...
Traveling waves of diffusive predator-prey systems: disease outbreak propagation
0
2012
Hopf bifurcation and global periodic solutions in a delayed predator-prey system
0
2006
Global dynamics of a generalist predator-prey model in open advective environments
1
2022
... 自然界中的种群通过复杂的种间相互作用形成动态关联. 在生态系统中, 一种生物以另一种生物为食的种间关系称为捕食. 捕食是生物获取能量和营养物质的主要方式之一,其能起到优胜劣汰、协同进化, 进而达到维护生态系统稳定的作用. 近年来,很多学者对刻画两种群动态演化的捕食-食饵模型的动力学性质进行了研究[1 4 ] . ...
1
1931
... 生态学家们发现, 当食饵稀缺时, 捕食者的繁殖率会显著下降, 这表明捕食者的环境容纳量与食饵密度成正比, 即捕食者的种群增长率受食饵密度的限制[5 ] 基于此, Leslie 和 Gower 在文献 [6 ] 中研究了一个随机的捕食-食饵模型, 即现在广为所知的 Leslie-Gower 模型. 经典的 Leslie-Gower 模型具有如下形式 ...
The properties of a stochastic model for the predator-prey type of interaction between two species
1
1960
... 生态学家们发现, 当食饵稀缺时, 捕食者的繁殖率会显著下降, 这表明捕食者的环境容纳量与食饵密度成正比, 即捕食者的种群增长率受食饵密度的限制[5 ] 基于此, Leslie 和 Gower 在文献 [6 ] 中研究了一个随机的捕食-食饵模型, 即现在广为所知的 Leslie-Gower 模型. 经典的 Leslie-Gower 模型具有如下形式 ...
Bogdanov-Takens bifurcation in a Leslie-Gower predator-prey model with prey harvesting
1
2014
... 其中 $u(t)$ 和 $v(t)$ 分别表示 $t$ 时刻食饵与捕食者的密度, $\frac{\gamma v}{u}$ 项表示捕食者的环境承载量与食饵种群的密度成正比. 该模型因能准确刻画捕食者的环境承载量受食饵密度制约, 受到了学者们广泛的研究[7 9 ] . ...
Global stability and Hopf bifurcation in a delayed diffusive Leslie-Gower predator-prey system
0
2012
Spatiotemporal dynamics of a modified Leslie-Gower model with weak Allee effect
1
2020
... 其中 $u(t)$ 和 $v(t)$ 分别表示 $t$ 时刻食饵与捕食者的密度, $\frac{\gamma v}{u}$ 项表示捕食者的环境承载量与食饵种群的密度成正比. 该模型因能准确刻画捕食者的环境承载量受食饵密度制约, 受到了学者们广泛的研究[7 9 ] . ...
Predator-prey models with delay and prey harvesting
0
2001
Traveling wave solutions of a delayed prey-predator system with diffusion
1
2017
... 在生态系统中,食饵种群密度的变化对于捕食者种群增长率的影响不是瞬时发生的,而是有一定的延迟时滞,这表明捕食者种群的当前增长率依赖于过去某一时刻食饵的密度, 时滞对于捕食- 食饵模型的影响不能被忽略[11 ,12 ] . 此外,在研究某有限区域内种群的数量变化时,研究者们发现种群密度随空间位置不同而有所变化[12 14 ] ,种群中的个体也会在栖息区域内进行随机运动, 将种群在空间区域的自由扩散考虑到捕食-食饵模型后,能更好地反映自然界中种群动态的时空演化过程. ...
一个扩散模型中恐惧效应与集群行为协同诱导的时空动力学研究
2
2024
... 在生态系统中,食饵种群密度的变化对于捕食者种群增长率的影响不是瞬时发生的,而是有一定的延迟时滞,这表明捕食者种群的当前增长率依赖于过去某一时刻食饵的密度, 时滞对于捕食- 食饵模型的影响不能被忽略[11 ,12 ] . 此外,在研究某有限区域内种群的数量变化时,研究者们发现种群密度随空间位置不同而有所变化[12 14 ] ,种群中的个体也会在栖息区域内进行随机运动, 将种群在空间区域的自由扩散考虑到捕食-食饵模型后,能更好地反映自然界中种群动态的时空演化过程. ...
... [12 14 ],种群中的个体也会在栖息区域内进行随机运动, 将种群在空间区域的自由扩散考虑到捕食-食饵模型后,能更好地反映自然界中种群动态的时空演化过程. ...
Spatiotemporal dynamics induced by the interaction between fear and schooling behavior in a diffusive model
2
2024
... 在生态系统中,食饵种群密度的变化对于捕食者种群增长率的影响不是瞬时发生的,而是有一定的延迟时滞,这表明捕食者种群的当前增长率依赖于过去某一时刻食饵的密度, 时滞对于捕食- 食饵模型的影响不能被忽略[11 ,12 ] . 此外,在研究某有限区域内种群的数量变化时,研究者们发现种群密度随空间位置不同而有所变化[12 14 ] ,种群中的个体也会在栖息区域内进行随机运动, 将种群在空间区域的自由扩散考虑到捕食-食饵模型后,能更好地反映自然界中种群动态的时空演化过程. ...
... [12 14 ],种群中的个体也会在栖息区域内进行随机运动, 将种群在空间区域的自由扩散考虑到捕食-食饵模型后,能更好地反映自然界中种群动态的时空演化过程. ...
Pattern formation in diffusive predator-prey systems with predator-taxis and prey-taxis
1
2021
... 在生态系统中,食饵种群密度的变化对于捕食者种群增长率的影响不是瞬时发生的,而是有一定的延迟时滞,这表明捕食者种群的当前增长率依赖于过去某一时刻食饵的密度, 时滞对于捕食- 食饵模型的影响不能被忽略[11 ,12 ] . 此外,在研究某有限区域内种群的数量变化时,研究者们发现种群密度随空间位置不同而有所变化[12 14 ] ,种群中的个体也会在栖息区域内进行随机运动, 将种群在空间区域的自由扩散考虑到捕食-食饵模型后,能更好地反映自然界中种群动态的时空演化过程. ...
一类具有非局部扩散和空间异质性年龄-空间结构松材线虫病模型动力学分析
1
2025
... 近年来,研究者们发现, 食饵种群个体间的种内竞争压力不仅来自附近个体, 还来自一定空间范围内甚至整个种群中其他个体的累积影响[15 17 ] . 这与传统模型中假设食饵群体的种内竞争只与个体紧邻的同类有关不同. 这种 “非局部竞争” 对于刻画某些食饵种群的种内竞争更准确. 为了更好地刻画这种 ``非局部" 种内竞争项, 非局部的空间核函数常常被考虑到模型中, 其一般形式为 ...
Dynamics of an age-space structure pine wilt disease model with nonlocal diffusion and spatial heterogeneity
1
2025
... 近年来,研究者们发现, 食饵种群个体间的种内竞争压力不仅来自附近个体, 还来自一定空间范围内甚至整个种群中其他个体的累积影响[15 17 ] . 这与传统模型中假设食饵群体的种内竞争只与个体紧邻的同类有关不同. 这种 “非局部竞争” 对于刻画某些食饵种群的种内竞争更准确. 为了更好地刻画这种 ``非局部" 种内竞争项, 非局部的空间核函数常常被考虑到模型中, 其一般形式为 ...
Asymptotical profiles of an age-structured foot-and-mouth disease with nonlocal diffusion on a spatially heterogeneity environment
0
2023
Stability and bifurcation on predator-prey systems with nonlocal prey competition
1
2018
... 近年来,研究者们发现, 食饵种群个体间的种内竞争压力不仅来自附近个体, 还来自一定空间范围内甚至整个种群中其他个体的累积影响[15 17 ] . 这与传统模型中假设食饵群体的种内竞争只与个体紧邻的同类有关不同. 这种 “非局部竞争” 对于刻画某些食饵种群的种内竞争更准确. 为了更好地刻画这种 ``非局部" 种内竞争项, 非局部的空间核函数常常被考虑到模型中, 其一般形式为 ...
The bifurcation structure of the Holling-Tanner model for predator-prey interactions using two-timing
1
2003
... 作为一类典型的捕食-食饵模型, Leslie-Gower 模型因其丰富的动力学特性而受到广泛研究. 对于不具扩散的 Leslie-Gower 模型, Braza 在文献 [18 ] 中借助双时序法研究了此类模型的分支结构, 证明了 Hopf 分支及不稳定极限环的存在性; Xiang 等在文献 [19 ] 中分析了一类考虑食饵避难所的 Leslie-Gower 模型, 证明了退化 Hopf 分支与退化 Bogdanov-Takens 分支、周期轨和同宿环的存在性. 目前国内外关于该系统的分支研究绝大多数局限于由单参数驱动的 Hopf 分支, 而关于双参数驱动的 Hopf-Hopf 分支研究较少. ...
Bifurcations in Holling-Tanner model with generalist predator and prey refuge
1
2023
... 作为一类典型的捕食-食饵模型, Leslie-Gower 模型因其丰富的动力学特性而受到广泛研究. 对于不具扩散的 Leslie-Gower 模型, Braza 在文献 [18 ] 中借助双时序法研究了此类模型的分支结构, 证明了 Hopf 分支及不稳定极限环的存在性; Xiang 等在文献 [19 ] 中分析了一类考虑食饵避难所的 Leslie-Gower 模型, 证明了退化 Hopf 分支与退化 Bogdanov-Takens 分支、周期轨和同宿环的存在性. 目前国内外关于该系统的分支研究绝大多数局限于由单参数驱动的 Hopf 分支, 而关于双参数驱动的 Hopf-Hopf 分支研究较少. ...
On the zeros of transcendental functions with applications to stability of delay differential equations with two delays
1
2003
... 显然, 特征方程 (2.8) 为超越方程, 不易直接算得特征根的分布情况.因此, 在分析特征根的分布情况之前, 首先给出如下引理2.1[20 ,21 ] , 这个引理保证了特征方程 (2.8) 的根连续依赖于方程中的参数 $\tau$. ...
1
2012
... 显然, 特征方程 (2.8) 为超越方程, 不易直接算得特征根的分布情况.因此, 在分析特征根的分布情况之前, 首先给出如下引理2.1[20 ,21 ] , 这个引理保证了特征方程 (2.8) 的根连续依赖于方程中的参数 $\tau$. ...
1
2012
... 显然, 特征方程 (2.8) 为超越方程, 不易直接算得特征根的分布情况.因此, 在分析特征根的分布情况之前, 首先给出如下引理2.1[20 ,21 ] , 这个引理保证了特征方程 (2.8) 的根连续依赖于方程中的参数 $\tau$. ...
Double Hopf bifurcation in delayed reaction-diffusion systems
2
2020
... 借助文献 [22 ] 中的算法, 通过相应的变量代换, 就可以得到方程 (3.7) 的规范型. 如文献 [22 ] 中的定义, 对于一个赋范空间 $Y$, $V_j^ {4+2}(Y)$ 表示系数在 $Y$ 中的 $j$ 阶齐次多项式生成的空间, 其中 $z\in \mathbb{C}, \mu=(\mu_1,\mu_2)$ 且有 ...
... ] 中的算法, 通过相应的变量代换, 就可以得到方程 (3.7) 的规范型. 如文献 [22 ] 中的定义, 对于一个赋范空间 $Y$, $V_j^ {4+2}(Y)$ 表示系数在 $Y$ 中的 $j$ 阶齐次多项式生成的空间, 其中 $z\in \mathbb{C}, \mu=(\mu_1,\mu_2)$ 且有 ...
1
1983
... 文献 [23 ,第 7.5 章] 中证明了系统 (3.15) 有 12 种对应的动力学情形, 在下一节的数值模拟中, 我们以其中的情形 Ib 为例画出了系统在 Hopf-Hopf 分支点附近的分支图和相图. ...











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}